�@
| �@�h�k�r�|GP�[ |
�@�����N
�@SANE��
| �@ | �@ILS�O���C�h�p�X���˖ʂ̂R�����I�ȋN������ё��d�w�ɂ��p�X�����̕ω� |
| �@ILS-GP�̃y�[�W | �P�D�O���C�h�p�X�i�f�o�j�v���O�����̊T�v�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@ | |
| �Q�D�@�P���g�����̌v�Z���� �@�@�@�@�i�i�����t�@�����X�����j |
�Q�D�P�@�X�P�[�����f���������ʂƌv�Z�l�̔�r���� | |
| �@�Q�D�P�D�P�@��Q���������Ƃ��̕Έʓd�� | ||
| �@�Q�D�P�D�Q�@���˔ɂ��Έʓd�� | ||
| �@�Q�D�P�D�R�@��ܔɂ��Έʓd�� | ||
| �@�Q�D�P�D�S�@�i���i�C�ʒi���ߎ��j�ɂ��Έʓd�� | ||
| �@�Q�D�P�D�T�@�N���i�u�ߎ��j�ɂ��Έʓd���@ | ||
| �Q�D�Q�@����`��s�������ʂƌv�Z�l�̔�r���� | ||
| �@�Q�D�Q�D�P�@���˔ɂ��Έʓd�� | ||
| �@�Q�D�Q�D�Q�@��ܔɂ��Έʓd�� | ||
| �@�Q�D�Q�D�R�@�������͌^�ɂ��Έʓd�� | ||
| �Q�D�R�@�啪��`��s�������ʂƌv�Z�l�̔�r���� | ||
| �@�Q�D�R�D�P�@�C�ʒi���ɂ��Έʓd�� | ||
�@�@ �R�D�@�Q���g�����̌v�Z���� �@�@�@�@�@�i�L���v�`�������j �@�@�@�@�@�@�@�@ |
�R�D�P�@����`��s�������ʂƌv�Z�l�̔�r���� | |
| �@�R�D�P�D�P�@���˔ɂ��Έʓd�� | ||
| �@�R�D�P�D�Q�@��ܔɂ��Έʓd�� | ||
| �@�R�D�P�D�R�@�������͌^�ɂ��Έʓd�� | ||
| �R�D�Q�@���`��s�������ʂƌv�Z�l�̔�r���� | ||
| �@�R�D�Q�D�P�@�O���n�`�̃f�[�^ | ||
| �@�R�D�Q�D�Q�@�Q���g�����O���C�h�p�X�̕Έʓd�� | ||
| �@�R�D�Q�D�R�@�i�����t�@�����X�����O���C�h�p�X�̕Έʓd�� | ||
| �S�D�@SANE�� �@ILS�O���C�h�p�X���˖ʂ̂R�����I�ȋN������ё��d�w�ɂ��p�X�����̕ω� |
||
�@��b�m���̃y�[�W |
�@�O���C�h�p�X���u�̊�b�m���@�@�i11.4�́@ILS�@GP�j | �@�n�㑕�u�Ƌ@�㑕�u�̌��� |
�@�A���e�i�̃y�[�W |
�@�O���C�h�p�X�A���e�i | �@�R�[�i���t���N�^�A���e�i |
�P�D�@�O���C�h�p�X�v���O�����̊T�v
�@�h�k�r�O���C�h�p�X�{�݂̑O���ɂ��錚����S�����̍\�����A���邢�͒n�`�̋N����C�ʒi���́A�O���C�h�p�X�̐����U���d�g�Ɍ덷�����܂����A���̌덷�͋��e�l�ȉ��łȂ���Ȃ�܂���B���̌덷�̑傫����\���v�Z����v���O�����ł��B
�@�@�u�O���C�h�p�X�v�Z�p(GP-2007)�v�̊T�v���q�ׂ܂��B
| �\�t�g���� | �f�o�|�Q�O�O�V |
|---|---|
| ����N�� | 200�V�N1�Q�� |
| ���@�� | �����Ȃʼn^�p���̃v���O�����Ɠ���̌��ʂ�������܂��B |
| �v�Z�\�ȕ��� | �P���g�����i���L�̂R��ނ̃A���e�i�`���̌v�Z���ł��܂��B�j �@�i�P�j�R�[�i�[���t���N�^�A���e�i�i�V�^�C�v�j �@�i�Q�j�R�[�i�[���t���N�^�A���e�i�i���^�C�v�j �@�i�R�j�X�P�[�����f�������A���e�i�i�d�q�q�@��������No.38�̌��ؗp�j �Q���g���� �@�i�P�j�R�[�i�[���t���N�^�A���e�i�i�V�^�C�v�j �@�i�Q�j�R�[�i�[���t���N�^�A���e�i�i���^�C�v�j |
| ���������̌v�Z | �\�ł��B |
| ���ˁE��ܔg�v�Z�� | �L���q�z�b�t�E�z�C�w���X�̌v�Z�����g�p���Ă��܂��B �y�v�Z�����z �@���y�э��������g���ȏ�̔��ˁE��ܔ��̌덷�v�Z���ł��܂��B |
| ��Q���̎�� | 1.���˔A��ܔA�\���� |
| �@�E���y�э��������g���ȏ�ł��邱�ƁB | |
| �@�E�ʂ̔��ˌW����-1�Ƃ��Ă���B | |
| �@�E�����̌����̌v�Z���\�ł���B | |
| �Q�D�C�ʒi�� | |
| �R�D�N���n�` | |
| �n�ʔ��ˌW�� | ���ˌW����-1�Ƃ��Ă���B |
| �v�Z�\�Ȕ�s���� | �C�ӂ̍~���p�x�ł̐i���A����ш�荂�x�ł̐i���B |
| �I�t�Z�b�g���̌v�Z | �\�ł��B |
| �v�Z�o�� | �R�[�X�Έʁi��A�j�A�t���b�O�i��A�j�A�d�E���x�i��B�j |
| �J������ | FORTRAN |
| �n�r | Windows 95,98,2000,XP |
�Q�D�@�P���g�����O���C�h�p�X�̎������ʂƌv�Z�l�̌���
�@�O���C�h�p�X�̕����ɂ́A�����g���P�g�g�p�����u�P���g�����v�ƂQ�g�g�p�����u�Q���g�����v�Ƃ�����܂��B
�@�P���g�����ɂ́A�i�����t�@�����X�����ƃT�C�h�o���h���t�@�����X�����Ƃ�����܂����A���{�ł̓i�����t�@�����X�������p�����Ă��܂����B���������݂́A�P���g��������Q���i���ɃA���e�i�O���̒n�`�̋N���j�ɑ��Đ��\�̗D�ꂽ�Q���g�������p�����Ă��܂��B
�i�P�j�@�O���C�h�p�X���ӂ̏�Q����n�`���O���C�h�p�X�̓d�g�I�����ɋy�ڂ��e���𑍍��I�Ɍ��������������Ƃ��āA�w�O���C�h�p�X�ɑ���\�����E�n�`�̉e���ɂ��āx�i�d�q�q�@��������No.38�A1982.8�A���䒼���A�����i��A��c�P�Y�j������܂��B
�@���̌����ł́A�R���s���[�^�ɂ��\���v�Z�A�X�P�[�����f�������A�����g���̎����ǂɂ���s�����A���ۂɉ^�p���̃O���C�h�p�X�ɂ���s�f�[�^�̎��W����Ƃ����A�i�K�I���k���Ȍ��������Ȃ��Ă��܂��B
�@�P�Ɍv�Z�����R���s���[�^�v���O���������������ł́A���ۂ̗\���ɂ͎g�p�ł��܂���B���̂悤�Ȋ�b�I�Ȍ����́A�ꎞ�I�ɂ͌o�������܂����A��U�A�덷�\����@���m������A�Ȍ�̌����ɂ����Čo��͈����ƂȂ�A�������Ԃ��Z���Ȃ�܂��B
�@ ���̌����ɂ���ėL�p�����m�F���ꂽ�덷�v�Z�v���O�����́A���̌�A�^�A�ȁi�����y��ʏȁj�̃R���s���[�^�ɈڐA����A���݂Ɏ���܂ŃO���C�h�p�X�{�݂̐V�ݎ���A���ӂ̍\�������ݎ��Ȃǂɂ����āA�O���C�h�p�X�U���d�g�̗���ɂ��덷��\�����邽�߂ɗL���Ɏg�p����Ă��܂��B
�i�Q�j�@AVITEC�ł́A�ŋ߂̃p�[�\�i���R���s���[�^�̍����\���i�僁�����[�e�ʋy�э������j�ɂƂ��Ȃ��AWindows��œ��삷��덷�v�Z�v���O�������쐬���܂����B�v���O��������̌��́A��q�̓d�q�q�@��������No.38�Ɍf�ڂ���Ă�������f�[�^�Ɣ�r���čs���܂����B��L�̕��̎����f�[�^������擾�������ƁA����ѕ��Ɏ����̏��������L����Ă��邱�Ƃ���A���̂悤�Ȓlj������\�ƂȂ�܂��B��L�̕�������p�����}�ɂ́A�}�̉��ɂ��̎|���L���܂����B����̌v�Z�ł́A�L���q�z�b�t�E�z�C�w���X�̌v�Z����p���܂������A����A���[�����g�@���ɂ�錟�����s�����ꍇ���A�v�Z���ʂ̌��ɂ͏�̕��̎������ʂ𗘗p�������ƍl���Ă��܂��B
�ȉ��Ɍ��،��ʂ������܂��B
�Q�D�P�@�X�P�[�����f���������ʂƌv�Z�l�̔�r����
�@
�@�d�g�������ɂ����āA���ӂɏ�Q���������݂��Ȃ����z�I�ȏŁA9.6GH���̃}�C�N���g���g�p�����i�����t�@�����X�����̃O���C�h�p�X�������u��p���āA��29���̂P�̃X�P�[�����f�������ɂ��m�F���덷�\���v�Z�̊�{�I�ȍl�����̓K�ۂׂĂ��܂��B
�@�{�X�P�[�����f���������u�́A�d�q�q�@�������̒����������炪���M�@�A��M�@�A�A���e�i�n�A�����p�J�E���^�[�|�[�Y���̑S�Ă����肳�ꂽ���̂ł��B���u�̏ڍׂɂ��ẮA�w�n���Q�ɂ��ILS�d�g��Q�̉�͂Ɩ͌^�����x�i�d�q�q�@��������No.31�A1981.3�A���������A���ЗY�A���c�ߗY�A�R�c���j�A���R���u�j���Q�Ƃ���Ă��������B
�@�������u�̏����͉��L�̒ʂ�ł��B
�@
| ���@�� | ���@�� |
| ���M���g�� | �X�D�U GHz |
| �O���C�h�p�X�p�x | �U�D�U�X�x |
| �p�X�p�x | �P�D�P�Q�x |
| �O���C�h�p�X�̕��� | �i�����t�@�����X���� |
| ���M�A���e�i | ���C�_�C�|�[���A���e�i�i�Q�j |
| ��M�A���e�i | ���C�_�C�|�[���A���e�i |
| ���U�� | �K���_�C�I�[�h |
| ���U��o�� | ��200m�v |
| �J�E���^�[�|�C�Y | �Sm�~�Sm ��1m�~�c2m�̃A���~���W���g�p���Ă���B |
�@�������u�̔z�u�}���}�P�Ɏ����܂��B
�@�J�E���^�[�|�C�Y��ɐݒu�������˔���щ�ܔ̈ʒu���}�Q�Ɏ����܂��B
 |
 |
| �}�P�D�X�P�[�����f���̎����T���} | �}�Q�D���˔E��ܔݒu�ʒu�} |
| �i�d�q�q�@��������No.38������p,�j | |
�Q�D�P�D�P�@��Q���������Ƃ��̕Έʓd��
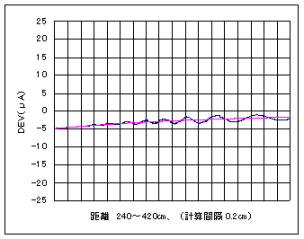
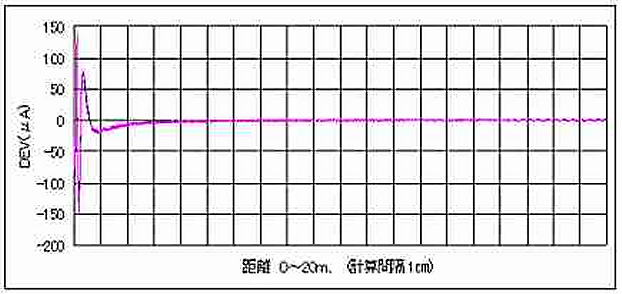
�@��Q����ݒu���Ȃ��Ƃ��ɁA�p�X�p�x�U�D�U�X�x�ŁA�����Q�O��(2,000�p)����O���i0�p�j�܂ō~���i�������Ɖ��肵���Ƃ��̃p�X�����̌v�Z�l���}�R�Ɏ����܂��B
�@�����̂P�ڐ���͂P���i100�p�j�ł��B�X�P�[�����f���������u�ł́A�A���e�i����Q�D�S���`�S�D�Q���̊Ԃł̃f�[�^���擾���Ă��܂��̂ŁA�Q�D�S�ڐ��肩��S�D�Q�ڐ���̊Ԃ̖���Q���������������ƂɂȂ�܂��B
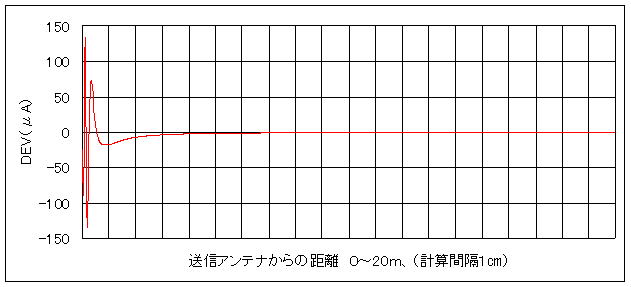 |
| �}�R�D��Q�����Ȃ��Ƃ��̃p�X�����v�Z�l�i�A���e�i�ʒu�`20m�j |
�@�X�P�[�����f���������u�ł́A�A���e�i����Q�D�S���`�S�D�Q���̊Ԃł̃f�[�^���擾���Ă��܂��B
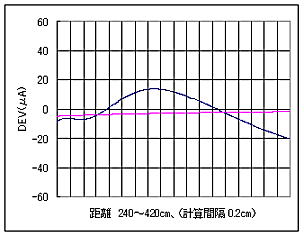
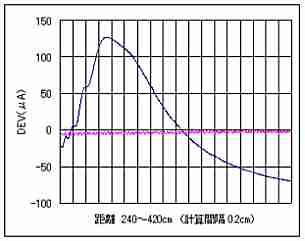
�}�S�́A�}�R�̌v�Z�͈͂̂����̂Q�D�S���i240�p�j�`�S�D�Q���i420�p�j�����Ċg��\���������̂ł��B
�Ȍ��AVITEC�v�Z�l�̃O���t�ɂ́A���̓�����ԐF�ŋL�����܂����B
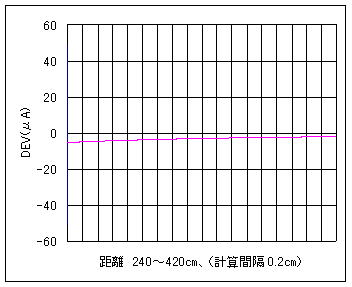 |
| �}�S�D��Q�����Ȃ��Ƃ��̃p�X�����v�Z�l�i�A���e�i����2.4m�`4.2m�j |
�@�������u�̃p�X�������̌v�Z�l���}�T�Ɏ����܂��B�}�V�T�ʂ`�Ԃ̃p�X���́A�����l�Ɠ����P�D�P�Q�x�ƂȂ�܂��B
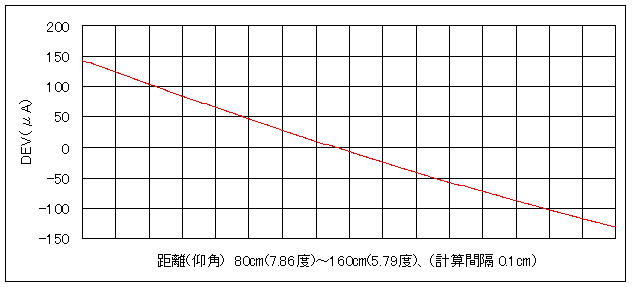 |
| �}�T�D��Q�����Ȃ��Ƃ��̃p�X�������i�p7.86�x�`5.79�x�j |
�Q�D�P�D�Q�@���˔ɂ��Έʓd��
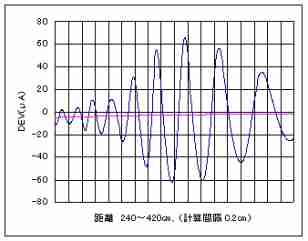
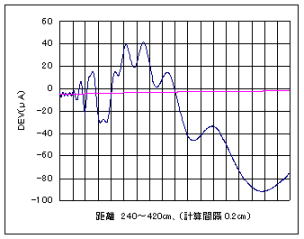
�@�}�U-�`�́A���R�O�p�A�����P�T�p�̐����A���~���J�E���^�[�|�C�Y��̐}�Q�A�@�̈ʒu�ɔ��˔Ƃ��Đݒu�����Ƃ��́A�d�q�q�@��������No.3�ɋL�ڂ���Ă�������l����ьv�Z�l�����p�������̂ł��B
�@�}6-B�́AAvitec�v�Z�l�ł��B�}���̐Ԑ��̃O���t�́A�}�S�̖���Q�����̃p�X�����ł��B
�@�`�}�Ƃa�}�̃O���t�̉����̋����͈͂́A��r��e�Ղɂ��邽�ߓ���ɂ��Ă���܂��B
�@���ʔ��˔͈͂̂R���`�R�D�U���ő傫�Ȍ덷���Ă���A���ʔ��˂̒��S�R�D�R���t�߂ōő�덷���Ă��܂��B
�@DEV�̍ő�U���iPP�l�j���r����ƁAAvitec�v�Z�l�^ENRI�����l��125�^120��1.04�ƂȂ�܂��B
�@DEV�̐U���̕ω��́A�v���X�̃s�[�N�����O���t�Ƃ��X�|�C���g�ł����v���Ă��܂��B
�@�Ȃ��A���[�̋���240�p�ł�DEV���ϒl�́A�����l���قڂO�ʂ`�ł���̂ɑ��A�v�Z�l�͖�-�S�ʂ`�ƂȂ��Ă��܂����A���̍��̌����́A�����ɂ����Ă�DEV���O�ʂ`�̈ʒu���v���̊�_�Ƃ������߂ł��B
�@�{�����ł̃f�[�^�̎擾�́A�Q�T�Ԓ��x�ɂ킽���čs�������߁A�����A�d��������A�S�@��̃E�I�[�~���O�A�b�v����ђ������K�v�ł���A���̌��ʁA�e�v���f�[�^�̂O�_�Ɏ�̍��������Ă��܂��B
�@���̂��߁A�����l�ƌv�Z�l�̔�r�́A�v���X�A�}�C�i�X�̃s�[�N�l�iPP�l�j�Ŕ�r����̂��ǂ��ƍl���܂��B
�@
 |
 |
| �}�U-A�D���˔@��ENRI�����l����ьv�Z�l | �@�@�@�@�@�}�U-B�D���˔@��AVITEC�v�Z�l |
| �i�d�q�q�@��������No.38������p,�j |
�@�}�V-�`�́A���R�O�p�A�����P�T�p�̐����A���~���J�E���^�[�|�C�Y��̐}�Q�A�A�̈ʒu�ɔ��˔Ƃ��Đݒu�����Ƃ��́A�d�q�q�@��������No.3�ɋL�ڂ���Ă�������l����ьv�Z�l�����p�������̂ł��B
�@�}�V-B�́AAvitec�v�Z�l�ł��B�}���̐Ԑ��̃O���t�́A�}�S�̖���Q�����̃p�X�����ł��B
�@���ʔ��˔͈͂̂R���`�R�D�U���ő傫�Ȍ덷���Ă���A���ʔ��˂̒��S�R�D�R���t�߂ōő�덷���Ă��܂��B
�@DEV�̍ő�U���iPP�l�j���r����ƁAAvitec�v�Z�l�^ENRI�����l��108�^103��1.05�ƂȂ�܂��B
�@DEV�̐U���̕ω��́A�v���X�̃s�[�N�����O���t�Ƃ��P�Q�|�C���g�ł����v���Ă��܂��B
 |
 |
| �}�V-�`�D���˔A��ENRI�����l����ьv�Z�l | �}�V-B�D���˔A��AVITEC�v�Z�l |
| �i�d�q�q�@��������No.38������p,�j |
�@�}�W-�`�́A���R�O�p�A�����P�T�p�̐����A���~���J�E���^�[�|�C�Y��̐}�Q�A�B�̈ʒu�ɔ��˔Ƃ��Đݒu�����Ƃ��́A�d�q�q�@��������No.3�ɋL�ڂ���Ă�������l����ьv�Z�l�����p�������̂ł��B
�@�}�W-B�́AAvitec�v�Z�l�ł��B�}���̐Ԑ��̃O���t�́A�}�S�̖���Q�����̃p�X�����ł��B
�@���ʔ��˔͈͂̂R���`�R�D�U���ő傫�Ȍ덷���Ă���A���ʔ��˂̒��S�R�D�R���t�߂ōő�덷���Ă��܂��B
�@DEV�̍ő�U���iPP�l�j���r����ƁAAvitec�v�Z�l�^ENRI�����l��71�^74��0.96�ƂȂ�܂��B
�@DEV�̐U���̕ω��́A�v���X�̃s�[�N�����O���t�Ƃ��P�U�|�C���g�ł����v���Ă��܂��B
 |
 |
| �}�W-A�D���˔B��ENRI�����l����ьv�Z�l | �}�W-�a�D���˔B��AVITEC�v�Z�l |
| �i�d�q�q�@��������No.38������p,�j |
�@�}�X-�`�́A���R�O�p�A�����P�T�p�̌X�Ίp�U�O�x�̃A���~���J�E���^�[�|�C�Y��̐}�Q�A�C�̈ʒu�i�@�Ɠ����ʒu�j�ɔ��˔Ƃ��Đݒu�����Ƃ��́A�d�q�q�@��������No.3�ɋL�ڂ���Ă�������l����ьv�Z�l�����p�������̂ł��B
�@�}�X-B�́AAvitec�v�Z�l�ł��B�}���̐Ԑ��̃O���t�́A�}�S�̖���Q�����̃p�X�����ł��B
�@���ʔ��˔͈͂̂R���`�R�D�U���ő傫�Ȍ덷���Ă���A���ʔ��˂̒��S�R�D�R���t�߂ōő�덷���Ă��܂��B
�@���˖ʂ��U�O�x�X�������߁A�덷�����l�͇@�̐������˖ʂ̂Ƃ��̖�W���Ɍ������Ă��܂��B
�@DEV�̍ő�U���iPP�l�j���r����ƁAAvitec�v�Z�l�^ENRI�����l��3�^9��0.3�ƂȂ�A���Ȃ�̍�������܂��B���̍��̌����ɂ��Ă͍X�Ɍ������K�v�ł��B
�@DEV�̐U���̕ω��́A�v���X�̃s�[�N�����O���t�Ƃ��P�O�|�C���g�ł����v���Ă��܂��B
 |
 |
| �}�X-�`�D���˔C��ENRI�����l����ьv�Z�l | �}�X-�a�D���˔C��AVITEC�v�Z�l |
| �i�d�q�q�@��������No.38������p,�j |
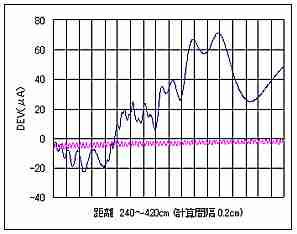
�Q�D�P�D�R�@��ܔɂ��Έʓd��
�@�}10-�`�́A���R�O�p�A�����P�T�p�̐����A���~���J�E���^�[�|�C�Y��̐}�Q�A�D�̎�M�A���e�i�̐^���ʒu�ɉ�ܔƂ��Đݒu�����Ƃ��́A�d�q�q�@��������No.3�ɋL�ڂ���Ă�������l����ьv�Z�l�����p�������̂ł��B
�@����250�p�ȓ��ł͔��˂ɂ��덷�A����250�p�ȉ��ł͎Օ��ɂ���܌덷���\��Ă��܂��B
�@�}10-B�́AAvitec�v�Z�l�ł��B�}���̐Ԑ��̃O���t�́A�}�S�̖���Q�����̃p�X�����ł��B
�@DEV�̍ő�U���iPP�l�j���r����ƁAAvitec�v�Z�l�^ENRI�����l��131�^103��1.27�ƂȂ�A���Ȃ�̍�������܂��B���̍��̌����ɂ��Ă͍X�Ɍ������K�v�ł��B
�@DEV�̐U���̕ω��̑嗪�̌X���́A�قڈ�v���Ă��܂��B
 |
 |
| �}10-�`�D��ܔD��ENRI�����l����ьv�Z�l | �}10-�a�D��ܔD��AVITEC�v�Z�l |
| �i�d�q�q�@��������No.38������p,�j |
�@�}11-�`�́A���R�O�p�A�����P�T�p�̐����A���~���J�E���^�[�|�C�Y��̐}�Q�A�E�̈ʒu�ɉ�ܔƂ��Đݒu�����Ƃ��́A�d�q�q�@��������No.3�ɋL�ڂ���Ă�������l����ьv�Z�l�����p�������̂ł��B
�@����250�p�ȓ��ł͔��˂ɂ��덷�A����250�p�ȉ��ł͎Օ��ɂ���܌덷���\��Ă��܂��B
�@�}11-B�́AAvitec�v�Z�l�ł��B�}���̐Ԑ��̃O���t�́A�}�S�̖���Q�����̃p�X�����ł��B
�@DEV�̍ő�U���iPP�l�j���r����ƁAAvitec�v�Z�l�^ENRI�����l��63�^59��1.07�ƂȂ�A�قڈ�v���Ă��܂��B
�@DEV�̐U���̕ω��̑嗪�̌X���́A�قڈ�v���Ă��܂��B
 |
 |
| �}11-�`�D��ܔE��ENRI�����l����ьv�Z�l | �}11-�a�D��ܔE��AVITEC�v�Z�l |
| �i�d�q�q�@��������No.38������p,�j |
�@�}12-�`�́A���R�O�p�A�����P�T�p�̐����A���~���J�E���^�[�|�C�Y��̐}�Q�A�E�̈ʒu�ɉ�ܔƂ��Đݒu�����Ƃ��́A�d�q�q�@��������No.3�ɋL�ڂ���Ă�������l����ьv�Z�l�����p�������̂ł��B
�@����250�p�ȓ��ł͔��˂ɂ��덷�A����250�p�ȉ��ł͎Օ��ɂ���܌덷���\��Ă��܂��B
�@�}12-B�́AAvitec�v�Z�l�ł��B�}���̐Ԑ��̃O���t�́A�}�S�̖���Q�����̃p�X�����ł��B
�@DEV�̍ő�U���iPP�l�j���r����ƁAAvitec�v�Z�l�^ENRI�����l��21�^20��1.05�ƂȂ�A�قڈ�v���Ă��܂��B
�@DEV�̐U���̕ω��̑嗪�̌X���́A�قڈ�v���Ă��܂��B
 |
 |
| �}12-�`�D��ܔF��ENRI�����l����ьv�Z�l | �}12-�a�D��ܔF��AVITEC�v�Z�l |
| �i�d�q�q�@��������No.38������p,�j |
�@�}13-�`�́A���R�O�p�A�����P�T�p�̌X�Ίp�U�O�x�̃A���~���J�E���^�[�|�C�Y��̐}�Q�A�G�̈ʒu�ɐݒu�����Ƃ��́A�d�q�q�@��������No.3�ɋL�ڂ���Ă�������l����ьv�Z�l�����p�������̂ł��B
�@������260�p�ȓ��ł͔��˂ɂ��덷�A�ȉ��ł͎Օ��ɂ���܌덷���\��Ă��܂��B
�@�}13-B�́AAvitec�v�Z�l�ł��B�}���̐Ԑ��̃O���t�́A�}�S�̖���Q�����̃p�X�����ł��B
�@DEV�̍ő�U���iPP�l�j���r����ƁAAvitec�v�Z�l�^ENRI�����l��100�^100��1.0�ƂȂ�A��v���Ă��܂��B
�@DEV�̐U���̕ω��̑嗪�̌X���́A�قڈ�v���Ă��܂��B
 |
 |
| �}13-�`�D��ܔG��ENRI�����l����ьv�Z�l | �}13-�a�D��ܔG��AVITEC�v�Z�l |
| �i�d�q�q�@��������No.38������p,�j |
�Q�D�P�D�S�@�i���i�C�ʒi���ߎ��j�ɂ��Έʓd��
�@�C��ɐݒu���ꂽ��`�ł́A�O���C�h�p�X�A���e�i�O���ɐ����[�g���̊C�ʒi��������B���̒i���ɂ��O���C�h�p�X�̕Έʌ덷���X�P�[�����f�������ɂ��m�F�����B
�@�}�P�̎������u�̂S���~�S���̃J�E���^�[�|�C�Y��A�������ɁA���Q���A�c�P���A�����R�D�T�p�̃A���~��ݒu���A���̏�ɃO���C�h�p�X�A���e�i��ݒu�����B���M�A���e�i����i���܂ł̋����͂P�D�W���ł���B
�@�i���̑O���ɂ͍X�ɂQ���̊C�ʂɌ����Ă��A���~�����݂���B
�@
�@�@�}14-�`�́A�d�q�q�@��������No.38�ɋL�ڂ���Ă�������l����ьv�Z�l�����p�������̂ł��B
�@�@�}14-B�́AAvitec�v�Z�l�ł��B�}���̐Ԑ��̃O���t�́A�}�S�̖���Q�����̃p�X�����ł��B
�@DEV�̍ő�U���iPP�l�j���r����ƁAAvitec�v�Z�l�^ENRI�����l��31�^30��1.03�ƂȂ�A�قڈ�v���Ă��܂��B
�@DEV�̐U���̕ω��̑嗪�̌X���́A�قڈ�v���Ă��܂��B
 |
 |
| �}14-�`�D�C�ݒi����ENRI�����l����ьv�Z�l | �}14-�a�D�C�ݒi����AVITEC�v�Z�l |
| �i�d�q�q�@��������No.38������p,�j |
�@�h����̌��ʂ��m�F���邽�߁A�i���̏�ɍ����P�p�̃A���~��ݒu���ăf�[�^�����W�����B
�@�@�}15-�`�́A�d�q�q�@��������No.38�ɋL�ڂ���Ă�������l����ьv�Z�l�����p�������̂ł��B
�@�@�}14-A�̎����l�iPP�l�j30��A�ɑ���34�ʂ`�Ɩ�13���������Ă��܂��B
�@�@�}15-B�́AAvitec�v�Z�l�ł��B�}���̐Ԑ��̃O���t�́A�}�S�̖���Q�����̃p�X�����ł��B
�@DEV�̍ő�U���iPP�l�j���r����ƁAAvitec�v�Z�l�^ENRI�����l��34�^34��1.0�ƂȂ�A��v���Ă��܂��B
�@DEV�̐U���̕ω��̑嗪�̌X���́A�قڈ�v���Ă��܂��B
 |
 |
| �}15-�`�D�C�ݒi����ENRI�����l����ьv�Z�l | �}15-�a�D�C�ݒi����AVITEC�v�Z�l |
| �i�d�q�q�@��������No.38������p,�j |
�Q�D�P�D�T�@�N���i�u�ߎ��j�ɂ��Έʓd��
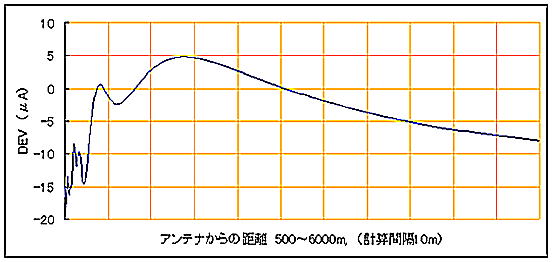
�@�X�P�[�����f���������u�ŁA�O���C�h�p�X�A���e�i�O���̑�n���˖ʂ��A���e�i�ʒu���狗���Q�O���܂ŕ��R�ł���Ɖ��肵���Ƃ��ɁA�p�X�p�x�U�D�U�X�x�ŁA�����Q�O��(2,000�p)����O���i0�p�j�܂ō~���i�������Ƃ��̃p�X�����̌v�Z�l���}�P�U�Ɏ����܂��B
�@�}�������́A������̑�n���˖ʂƉe���A���e�i��p���Čv�Z�������̂ł���A�O�L�}�R�̌v�Z�l���Čf�������̂ł��B
�@�}�����Ԑ��́A�A���e�i�ʒu���狗���Q�O���܂ŕ��R�ȑ�n���˖ʂł���Ɖ��肵�A���̑�n��Y�������ɖ������AX�������ɂT�`�Q�O�p�̕��̒Z����ɕ������A�e�Z���ʂ���̔��˔g�d�E���x�����t���l���ϕ��ɂ��v�Z�����Ƃ��̃p�X�����̌v�Z�l�ł��B
�@�Ԑ������̃O���t�͖w�Lj�v���Ă���A��n���˔g���t���l���ϕ��@�ɂ���Čv�Z���邱�Ƃ̑Ó������m�F�ł��܂��B
�@�����̂P�ڐ���͂P���i100�p�j�ł��B�X�P�[�����f���������u�ł́A�A���e�i����Q�D�S���`�S�D�Q���̊Ԃł̃f�[�^���擾���Ă��܂��̂ŁA�Q�D�S�ڐ��肩��S�D�Q�ڐ���̊Ԃ̖���Q���������������ƂɂȂ�܂��B
 |
| �}�P�U�D�t���l���ϕ��@�ɂ���n���˔g���v�Z�����Ƃ��̃p�X�����v�Z�l |
�@�@�}17-�`�́A�d�q�q�@��������No.38�ɋL�ڂ���Ă����}42�̎����l����ьv�Z�l�����p�������̂ł��B
�@���̎����ł́A���M�A���e�i�̑O����1.0���~2.0���̃A���~��������3.2�p�������Đݒu���u�Ɍ����ĂĎ������s���Ă���B
�@�@�}17-B�́AAvitec�v�Z�l�ł��B�}�����Ԑ��̃O���t�́A�}16�̖���Q�����̃p�X�����ł��B
�@DEV�̍ő�U���i�v���X��P�l�j���r����ƁAAvitec�v�Z�l�^ENRI�����l��70�^25��2.8�ƂȂ�A�v�Z�l�̂ق������Ȃ�傫���B
�@�Ȃ��A�Q�l�̂��߁AENRI�v�Z�l�^ENRI�����l��96�^25��3.8�ƂȂ�A���v�Z�l�̂ق������Ȃ�傫���Ȃ��Ă��܂��B
�@�d�q�q�@��������No.38��4.2.1���́A�w���̌����Ƃ��ẮA���d���˂̉e���Ɛ����Δg�����̊����l������B�x�Əq�ׂĂ��܂��B
�@���̍��̌����ɂ��ẮA����A�X�Ɍ����������ƍl���Ă��܂��B
 |
 |
| �}17-�`�D�O���N����ENRI�����l����ьv�Z�l | �}17-�a�D�O���N����AVITEC�v�Z�l |
| �i�d�q�q�@��������No.38������p,�j |
�@�@�}1�W-�`�́A�d�q�q�@��������No.38�ɋL�ڂ���Ă����}43�̎����l����ьv�Z�l�����p�������̂ł��B
�@���̎����ł́A���M�A���e�i�̑O����1.0���~2.0���̃A���~��������7.5�p�������Đݒu���u�Ɍ����ĂĎ������s���Ă���B
�@�@�}1�W-B�́AAvitec�v�Z�l�ł��B�}���̐Ԑ��̃O���t�́A�}16�̖���Q�����̃p�X�����ł��B
�@DEV�̍ő�U���iPP�l�j���r����ƁAAvitec�v�Z�l�^ENRI�����l��190�^125��1.5�ƂȂ�A�v�Z�l�̂ق������Ȃ�傫���BDEV�̐U���̕ω��̑嗪�̌X���́A�قڈ�v���Ă��܂��B
�@�Ȃ��A�Q�l�̂��߁AENRI�v�Z�l�^ENRI�����l��150�^125��1.2�ƂȂ�A���v�Z�l�̂ق����傫���Ȃ��Ă��܂��B
�@�d�q�q�@��������No.38��4.2.1���́A�w���̌����Ƃ��ẮA���d���˂̉e���Ɛ����Δg�����̊����l������B�x�Əq�ׂĂ��܂��B
�@���̍��̌����ɂ��ẮA����A�X�Ɍ����������ƍl���Ă��܂��B
 |
 |
| �}18-�`�D�O���N����ENRI�����l����ьv�Z�l | �}18-�a�D�O���N����AVITEC�v�Z�l |
| �i�d�q�q�@��������No.38������p,�j |
(���D�}19�`�}20�́A��̂��߂ɕۗ����܂��B)
�Q�D�Q�@����`��s��������(�i�����t�@�����X����)�ƌv�Z�l�̔�r����
�@����`�Ɏ����g���̃O���C�h�p�X�������u����є��˔A��ܔA�\�����͌^�����݂��A�O���C�h�p�X�̕������i�����t�@�����X�����A�l�A���[�����A�Q���g�����ɐ�ւ��āA�d�q�q�@�����������̔�s�����@�ɂ��Έʓd���𑪒肵�A�덷�\���v�Z�l�Ɣ�r�������s���Ă��܂��B
�@���M���g�� 329.899MHz, �p�X�p�R�D�O�x�A�p�X���O�D�V�x�ł��B
�Q�D�Q�D�P�@���˔ɂ��Έʓd��(�ك��t�@�����X����)
�@���˔Ɖ�ܔ͓���̂��̂ł��B���P�O���A�����P�O���̓S�g�Ɍď̖ԖڂP�U�o�̋��Ԃ������̂��Q���ׂāA���Q�O���A�����P�O���̏�Q���Ƃ��Ă��܂��B
�@�}�Q�P�̔��˔ƕ\�����ꂽ�ʒu�ɁA���Q�O���A�����P�O���̏�Q����ݒu���āA��s�����ɂ��f�[�^�����W�������̂ł��B�i���̂Ƃ��A��ܔ͐ݒu����Ă��܂���B�j
 |
| �}21�D����`��s����,�@���˔E��ܔݒu�ʒu�} |
| �i�d�q�q�@��������No.38������p,�j |
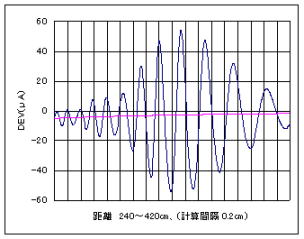
�@�@�}22-�`�́A�d�q�q�@��������No.38�ɋL�ڂ���Ă�������l�����p�������̂ł��B
�@�@�}22-B�́A�d�q�q�@��������No.38�ɋL�ڂ���Ă���v�Z�\���l�����p�������̂ł��B
�@�@�}22-C�́AAvitec�v�Z�l�ł��B�}���̐Ԑ��̃O���t�́A����Q�����̃p�X�����̌v�Z�l�ł��B
�@�`�}��C�}�̃O���t�̉����̋����͈͂́A��r��e�Ղɂ��邽�ߓ���ɂ��Ă���܂��B
�@DEV�̍ő�U���iPP�l�j���r����ƁAAvitec�v�Z�l�^ENRI�����l��102�^100��1.02�ƂȂ�A�قڈ�v���Ă��܂��B
�@DEV�̐U���̕ω��̑嗪�̌X���́A�قڈ�v���Ă��܂��B
 |
 |
| �}22-�`�D���˔�ENRI��s�������� | �}22-B�D���˔�ENRI�v�Z�l |
| �i�d�q�q�@��������No.38������p,�j | |
 |
 |
| �}22-C�D���˔�AVITEC�v�Z�l�i��̂Q�̐}�͓����j | |
�Q�D�Q�D�Q�@��ܔɂ��Έʓd��(�ك��t�@�����X����)
�@�}�Q�P�̉�ܔƕ\�����ꂽ�ʒu�ɁA���Q�O���A�����P�O���̏�Q����ݒu���āA��s�����ɂ��f�[�^�����W�������̂ł��B�i���̂Ƃ��A���˔͐ݒu����Ă��܂���B�j
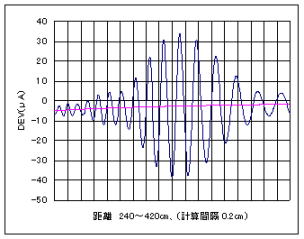
�@�@�}23-�`�́A�d�q�q�@��������No.38�ɋL�ڂ���Ă�������l�����p�������̂ł��B
�@�@�}23-B�́A�d�q�q�@��������No.38�ɋL�ڂ���Ă���v�Z�\���l�����p�������̂ł��B
�@�@�}23-C�́AAvitec�v�Z�l�ł��B�}���̐Ԑ��̃O���t�́A����Q�����̃p�X�����̌v�Z�l�ł��B
�@�`�}��C�}�̃O���t�̉����̋����͈͂́A��r��e�Ղɂ��邽�ߓ���ɂ��Ă���܂��B
�@DEV�̍ő�U���iPP�l�j���r����ƁAAvitec�v�Z�l�^ENRI�����l��340�^390��0.87�ƂȂ�܂��B
�@DEV�̐U���̕ω��̑嗪�̌X���́A�قڈ�v���Ă��܂��B
 |
 |
| �}23-�`�D��ܔ�ENRI��s�������� | �}23-B�D��ܔ�ENRI�v�Z�l |
| �i�d�q�q�@��������No.38������p,�j | |
 |
 |
| �}23-C�D��ܔ�AVITEC�v�Z�l�i��̂Q�̐}�͓����j | |
�Q�D�Q�D�R�@�������͌^�ɂ��Έʓd��(�ك��t�@�����X����)
�@�\�����Ƃ��āA�P�O���~�P�O���̓S�g���R�D�V���̍����ɑ�n�ɕ��s�ɖؘg�ŌŒ肵�A���̕\�ʂɌď̖ԖڂP�U�o�̋��Ԃ������̂��g�p���Ă��܂��B
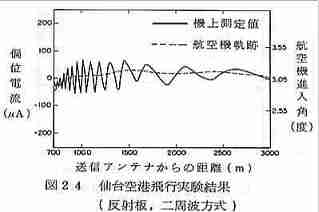
�@�}�Q�S�̍\�����͌^�ƕ\�����ꂽ�ʒu�ɁA�\������ݒu���āA��s�����ɂ��f�[�^�����W�������̂ł��B
 |
| �}24�D����`��s����,�@�������͌^�ݒu�ʒu�} |
| �i�d�q�q�@��������No.38������p,�j |
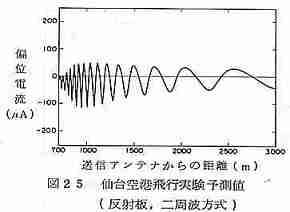
�@�@�}25-�`�́A�d�q�q�@��������No.38�ɋL�ڂ���Ă�������l�����p�������̂ł��B
�@�@�@DEV�̕��ϒl���S�̂�100�ʂ`�i0.47�x�ɑ�������j�قǃv���X�ɕψʂ��Ă��܂��B
�@�@�@�O���C�h�p�X�ݒ�p���R�x�ł���̂ŁA�����@�̎��ۂ̐i���p����R�D�T�x�ł��������Ƃ��킩��܂��B
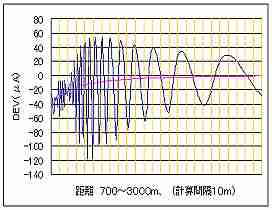
�@�@�}25-B�́A�d�q�q�@��������No.38�ɋL�ڂ���Ă���\���l�i�i���p�R�x�Ōv�Z�j�����p�������̂ł��B
�@�@�}25-C�́AAvitec�v�Z�l�i�i���p�R�x�Ōv�Z�j�ł��B
�@DEV�̍ő�U���i�v���X�̃s�[�N�l�j���r����ƁAAvitec�v�Z�l�^ENRI�����l��80�^80��1.0�ƂȂ�܂��B
�@DEV�̐U���̕ω��̑嗪�̌X���́A�قڈ�v���Ă��܂����A�}25-�`�̎����l���S�̂ɖ�100�ʂ`�i0.47�x�ɑ�������j�����֕ψʂ��Ă��܂��B
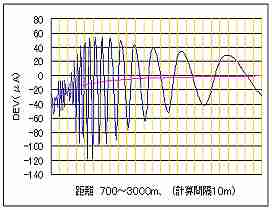
�@�@�}25-D�́AAvitec�v�Z�l�i�i���p3.5�x�Ōv�Z�j�ł��B�i���p��3.5�x�Ɖ��肵�čČv�Z�������̂ł��B
�@�@DEV�̍ő�U���i�v���X�̃s�[�N�l�j���r����ƁAAvitec�v�Z�l�^ENRI�����l��80�^80��1.0�ƂȂ�܂��B
�@�@�قڂP�q�ȉ���DEV�����́A�}25-A�̒l�ɋ߂Â��Ă��܂��B
�@�@�U���̕ω��̑嗪�̌X���́A�}25-A�ɂقڈ�v���Ă��܂��B
���D���̍\�����͌^�̎������ʂɌ���ADEV�̍ő�U���́w�v���X�̃s�[�N�l�x�Ŕ�r�������܂����B���̗��R�́A�}25-�`�̎������ʂ�����ƁA�����@�̐i���p�͂P�q�ȉ��ł͂R�D�T�x�قǂł���A�P�q�ȓ��ł͂R�x�t�߂ł��������Ƃ���������邽�߂ł��B
 |
 |
| �}25-�`�D��������ENRI��s�������� | �}25-B�D��������ENRI�v�Z�l�i�i���p�R�x�j |
| �i�d�q�q�@��������No.38������p,�j | |
 |
 |
| �}25-C�D��������AVITEC�v�Z�l�i�i���p�R�x�j | �}25-D�D��������AVITEC�v�Z�l�i�i���p3.5�x�j |
�Q�D�R�@�啪��`��s�������ʂƌv�Z�l�̔�r����
�@�d�q�q�@�������́A�啪��`��s�����ŊC�ݒi���ɂ��Έʓd���f�[�^���擾���A�덷�\���v�Z�l�Ɣ�r�������s���Ă��܂��B�ڍׂ́A�w�O���C�h�p�X�ɑ���\�����E�n�`�̉e���ɂ��āx�i�d�q�q�@��������No.38�A1982.8�A���䒼���A�����i��A��c�P�Y�j�x�@���Q�Ƃ��ĉ������B
�Q�D�R�D�P�@�C�ʒi���ɂ��Έʓd��(�ك��t�@�����X����)
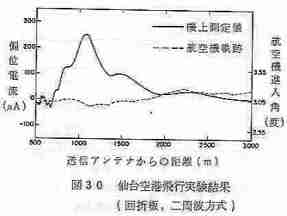
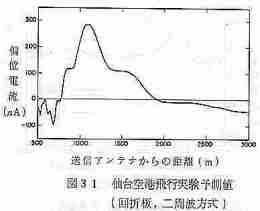
�@�}�Q�U�́A�啪��`�O���C�h�p�X���M�A���e�i�̑O���n�`�}�ł��B���M�A���e�i�O���S�T�W���܂ł͋�`�p�n���Ƃ��ĕ��R�Ȓn�`�������A���̐��Q�O���Ԃ̓e�g���|�b�g����`�p�n������P�����������܂Őς܂�Ă��āA����ɑO���͋�`�p�n������T���Ⴂ�C�ʂƂȂ��Ă���B
�@�O���C�h�p�X�̏����́A���M���g���R�R�Q�D�XMHz�A�p�X�p�R�x�A�p�X���O�D�V�Q�x�A�i�����t�@�����X�����ł��B�@
���D���݂̑啪��`�O���C�h�p�X�́A�w�Q���g�����x�ł��B
 |
| �}26�D�啪��`�O���C�h�p�X���M�A���e�i�O���n�`�} |
| �i�d�q�q�@��������No.38������p,�j |
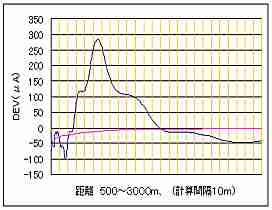
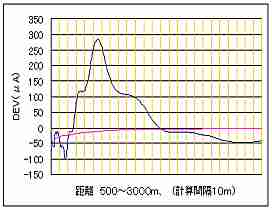
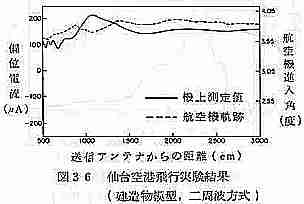
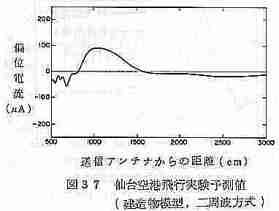
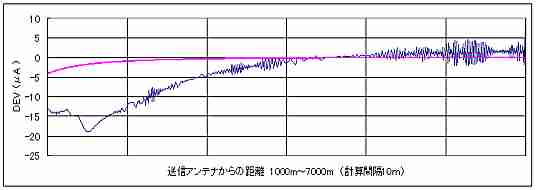
�}�Q�V�|�`�́A�d�q�q�@��������No.38�ɋL�ڂ���Ă���f�[�^�����p�������̂ł��B �@�����́w�@�㑪��l�x��DEV�����l�ł��B�_���́w�q��@�O���x�̓~�X�v�����g�ł���A�������́w�v�Z�l�x�ł��B |
 |
| �}27-A�D�啪��`ENRI��s�������� |
| �i�d�q�q�@��������No.38������p,�j |
�@�}27-B�́A�O�L�Q�D�P�D�S�����w�i���i�C�ʒi���ߎ��j�ɂ��Έʓd���x�Ŏg�p�����v���O�����ɁA�啪��`�̒n�`�f�[�^����͂��ăp�X�������v�Z�������̂ł��B �@�}�Q�V�|�`��ENRI�v�Z�l�i�_���j�Ɠ����̌X���͎��Ă��܂����A�S�̓I�ɖ�W�ʂ`�قǃ}�C�i�X�����ɕψʂ��Ă��܂��B |
 |
| �}27-B�D�啪��`AVITEC�v�Z�l�i�i���p3�x�j |
�R�D�@�Q���g�����O���C�h�p�X�̎������ʂƌv�Z�l�̌����@�@
�@�O���C�h�p�X�̕����ɂ́A�����g���P�g�g�p�����u�P���g�����v�ƂQ�g�g�p�����u�Q���g�����v�Ƃ�����܂��B
�@�P���g�����ɂ��Ă͏�L�Q�D�Ō����܂����B���ݓ��{�ł́A�P���g��������Q���i���ɃA���e�i�O���̒n�`�̋N���j�ɑ��Đ��\�̗D�ꂽ�Q���g�������p�����Ă��܂��B
�i�P�j�@�Q���g�����O���C�h�p�X���ӂ̏�Q����n�`���O���C�h�p�X�̓d�g�I�����ɋy�ڂ��e���ɂ��Ă��A�O�q���w�O���C�h�p�X�ɑ���\�����E�n�`�̉e���ɂ��āx�i�d�q�q�@��������No.38�A1982.8�A���䒼���A�����i��A��c�P�Y�j�Ō�����Ă��܂��B
�i�Q�j�@AVITEC�ō쐬�����v���O��������̌��́A��q�̓d�q�q�@��������No.38�Ɍf�ڂ���Ă�������f�[�^�Ɣ�r���čs���܂����B��L�̕�������p�����}�ɂ́A�}�̉��ɂ��̎|���L���܂����B
�ȉ��Ɍ��،��ʂ������܂��B
�R�D�P�@����`��s��������(�Q���g����)�ƌv�Z�l�̔�r����
�@����`�Ɏ����g���̃O���C�h�p�X�������u����є��˔A��ܔA�\�����͌^�����݂��A�O���C�h�p�X�̕������i�����t�@�����X�����A�l�A���[�����A�Q���g�����ɐ�ւ��āA�d�q�q�@�����������̔�s�����@�ɂ��Έʓd���𑪒肵�A�덷�\���v�Z�l�Ɣ�r�������s���Ă��܂��B
�@���M���g�� �f�B���N�V���i���n 329.899MHz, �N���A�����X�n 329.895MHz�A
�@���M�o�́@�@�f�B���N�V���i���n 900mW, �N���A�����X�n 100mW�A
�@�p�X�p �R�D05�x�A �p�X�� �O�D65�x�ł��B
�R�D�P�D�P�@���˔ɂ��Έʓd���i�Q���g�����j
�@���˔���щ�ܔ̐ݒu�ʒu�ɂ��ẮA���łɐ}21�Ɏ����܂������A���ɍČf���Ă����܂��B
���˔Ɖ�ܔ͓���̂��̂ł��B���P�O���A�����P�O���̓S�g�Ɍď̖ԖڂP�U�o�̋��Ԃ������̂��Q���ׂāA���Q�O���A�����P�O���̏�Q���Ƃ��Ă��܂��B
�@���˔Ɋւ�������ł́A�}�Q�P�̔��˔ƕ\�����ꂽ�ʒu�ɁA���Q�O���A�����P�O���̏�Q����ݒu���āA��s�����ɂ��f�[�^�����W���Ă��܂��B�i���̂Ƃ��A��ܔ͐ݒu����Ă��܂���B�j
|
| �}21�D����`��s����,�@���˔E��ܔݒu�ʒu�}(�Čf) |
| �i�d�q�q�@��������No.38������p,�j |
�@�@�}28-�`�́A�d�q�q�@��������No.38�ɋL�ڂ���Ă�������l�����p�������̂ł��B
�@�@�}28-B�́A�d�q�q�@��������No.38�ɋL�ڂ���Ă���v�Z�\���l�����p�������̂ł��B
�@�@�}28-C�́AAvitec�v�Z�l�ł��B�}���̐Ԑ��̃O���t�́A����Q�����̃p�X�����̌v�Z�l�ł��B
�@�`�}��C�}�̃O���t�̉����̋����͈͂́A��r��e�Ղɂ��邽�ߓ���ɂ��Ă���܂��B
�@DEV�̍ő�U���iPP�l�j���r����ƁAAvitec�v�Z�l�^ENRI�����l��170�^125��1.36�ƂȂ�A�v�Z�l�̂ق�����36���傫���ł��B
�@�i�Ȃ��AENRI�v�Z�l�^ENRI�����l��165�^125��1.32�ƂȂ�A�v�Z�l�̂ق�����32���傫���ł��B�j
�@DEV�̐U���̕ω��̑嗪�̌X���́A�قڈ�v���Ă��܂��B
�@�@���˔ɂ��ĂP���g�����ƂQ���g�����̌덷�����\�Ŕ�r���Ă݂܂��B(�p�X���ƃp�X�p�x���قȂ�̂ő嗪�̌X���ɂȂ�B�j
�@���̌��ʂ���A���̂悤�ȑ傫���̔��˔�W�L�̈ʒu�ɒu�����ꍇ�A�P���g�������Q���g�����̌덷���傫���Ȃ邱�Ƃ��킩��܂��B
�i�������A���ۂ̋�`�ɂ����Ă̓O���C�h�p�X�A���e�i�ɂ���قǐڋ߂��Ă��̂悤�ɑ傫�Ȕ��˔����݂��邱�Ƃ͂��肦�܂���B
�@���̎����́A�����܂Ō덷�f�[�^�̎��W��ړI�Ƃ��čs��ꂽ���̂ł��B�j�j
| �@���@�� | ENRI�����l | Avitec�v�Z�l |
| �P���g���� | �@�@�@100 | �@�@�@102 |
| �Q���g���� | �@�@�@125 | �@�@�@170 |
 |
 |
| �}28-�`�D���˔�ENRI��s�������� | �}28-B�D���˔�ENRI�v�Z�l |
| �i�d�q�q�@��������No.38������p,�j | |
 |
 |
| �}28-C�D���˔�AVITEC�v�Z�l�i��̂Q�̐}�͓����j | |
�R�D�P�D�Q�@��ܔɂ��Έʓd���i�Q���g�����j
�@�}�Q�P�̉�ܔƕ\�����ꂽ�ʒu�ɁA���Q�O���A�����P�O���̏�Q����ݒu���āA��s�����ɂ��f�[�^�����W�������̂ł��B�i���̂Ƃ��A���˔͐ݒu����Ă��܂���B�j
�@�@�}29-�`�́A�d�q�q�@��������No.38�ɋL�ڂ���Ă�������l�����p�������̂ł��B
�@�@�}29-B�́A�d�q�q�@��������No.38�ɋL�ڂ���Ă���v�Z�\���l�����p�������̂ł��B
�@�@�}29-C�́AAvitec�v�Z�l�ł��B�}���̐Ԑ��̃O���t�́A����Q�����̃p�X�����̌v�Z�l�ł��B
�@�`�}��C�}�̃O���t�̉����̋����͈͂́A��r��e�Ղɂ��邽�ߓ���ɂ��Ă���܂��B
�@DEV�̍ő�U���iPP�l�j���r����ƁAAvitec�v�Z�l�^ENRI�����l��380�^290��1.31�ƂȂ�A�v�Z�l�̂ق�����31���傫���ł��B
�@�i�Ȃ��AENRI�v�Z�l�^ENRI�����l��390�^290��1.34�ƂȂ�A�v�Z�l�̂ق�����34���傫���ł��B�j
�@DEV�̐U���̕ω��̑嗪�̌X���́A�قڈ�v���Ă��܂��B
�@�@��ܔɂ��ĂP���g�����ƂQ���g�����̌덷�����\�Ŕ�r���Ă݂܂��B(�p�X���ƃp�X�p�x���قȂ�̂ő嗪�̌X���ɂȂ�B)
�@�@���̌��ʂ���A���̂悤�ȑ傫���̉�ܔ�W�L�̈ʒu�ɒu�����ꍇ�A�����l�ł͂P���g�������Q���g�����̌덷���������Ȃ��Ă��܂��B�@�������A�v�Z�l�ł͋t�̌X���������Ă��܂��B��ܔɂ��덷��O�L�̔��˔ɂ��덷�Ɣ�r����ƁA��ܔ̕������˔��R�`�S�{�덷���傫���Ȃ��Ă��܂��B
�i�Ȃ��A���ۂ̋�`�ɂ����Ă̓O���C�h�p�X�A���e�i�ɂ���قǐڋ߂��Ă��̂悤�ɑ傫�ȉ�ܔ����݂��邱�Ƃ͂��肦�܂���B���̎����́A�����܂Ō덷�f�[�^�̎��W��ړI�Ƃ��čs��ꂽ���̂ł��B�j
| �@���@�� | ENRI�����l | Avitec�v�Z�l |
| �P���g���� | �@�@�@390 | �@�@�@340 |
| �Q���g���� | �@�@�@290 | �@�@�@380 |
 |
 |
| �}29-�`�D��ܔ�ENRI��s�������� | �}29-B�D��ܔ�ENRI�v�Z�l |
| �i�d�q�q�@��������No.38������p,�j | |
 |
 |
| �}29-C�D��ܔ�AVITEC�v�Z�l�i��̂Q�̐}�͓����j | |
�R�D�P�D�R�@�������͌^�ɂ��Έʓd���i�Q���g�����j
�@�\�����Ƃ��āA�P�O���~�P�O���̓S�g���R�D�V���̍����ɑ�n�ɕ��s�ɖؘg�ŌŒ肵�A���̕\�ʂɌď̖ԖڂP�U�o�̋��Ԃ������̂��g�p���Ă��܂��B
�@�}�Q�S(�Čf)�̍\�����͌^�ƕ\�����ꂽ�ʒu�ɁA�\������ݒu���āA��s�����ɂ��f�[�^�����W�������̂ł��B
|
| �}24�D����`��s����,�@�������͌^�ݒu�ʒu�}�i�Čf�j |
| �i�d�q�q�@��������No.38������p,�j |
�@�@�}30-�`�́A�d�q�q�@��������No.38�ɋL�ڂ���Ă�������l�����p�������̂ł��B
�@�@�@DEV�̕��ϒl���S�̂ɖ�180�ʂ`�i0.85�x�ɑ�������j�قǃv���X�ɕψʂ��Ă��܂��B
�@�@�@�O���C�h�p�X�ݒ�p���R�x�ł���̂ŁA�����@�̎��ۂ̐i���p����R�D85�x�ł��������Ƃ��킩��܂��B
�@�@�}30-B�́A�d�q�q�@��������No.38�A�}37�ɋL�ڂ���Ă���\���l�i�i���p�R�x�Ōv�Z�j�����p�������̂ł��B
�@�@�}30-C�́AAvitec�v�Z�l�i�i���p�R�x�Ōv�Z�j�ł��B
�@DEV�̍ő�U���i�v���X�̃s�[�N�l�j���r����ƁAAvitec�v�Z�l�^ENRI�����l��96�^75��1.28�ƂȂ�܂��B
�@DEV�̐U���̕ω��̑嗪�̌X���́A�قڈ�v���Ă��܂����A�}30-�`�̎����l���S�̂ɖ�180�ʂ`�i0.85�x�ɑ�������j�����֕ψʂ��Ă��܂��B
�@�@�}30-D�́AAvitec�v�Z�l�i�i���p3.85�x�Ōv�Z�j�ł��B�i���p��3.85�x�Ɖ��肵�čČv�Z�������̂ł��B
�@�@DEV�̍ő�U���i�v���X�̃s�[�N�l�j���r����ƁAAvitec�v�Z�l�^ENRI�����l��85�^75��1.13�ƂȂ�܂��B
�@�@�i�Ȃ��AENRI�v�Z�l�^ENRI�����l��90�^75��1.20�ł��B�j
�@�@�قڂP�q�ȉ���DEV�����́A�}30-A�̒l�ɋ߂Â��Ă��܂��B
�@�@�U���̕ω��̑嗪�̌X���́A�}30-A�ɂقڈ�v���Ă��܂��B
���D���̍\�����͌^�̎������ʂɌ���ADEV�̍ő�U���́w�v���X�̃s�[�N�l�x�Ŕ�r�������܂����B���̗��R�́A�}30-�`�̎������ʂ�����ƁA�����@�̐i���p�͂P�q�ȉ��ł͂R�D85�x�قǂł���A�P�q�ȓ��ł͂R�x�t�߂ł��������Ƃ���������邽�߂ł��B
 |
 |
| �}30-�`�D��������ENRI��s�������� | �}30-B�D��������ENRI�v�Z�l�i�i���p�R�x�j |
| �i�d�q�q�@��������No.38������p,�j | |
 |
 |
| �}30-C�D��������AVITEC�v�Z�l�i�i���p�R�x�j | �}30-D�D��������AVITEC�v�Z�l�i�i���p3.85�x�j |
�@�@�@
�R�D�Q�@���`��s�������ʂƌv�Z�l�̔�r����
�@�R�D�Q�D�P�@�O���n�`�̃f�[�^
�@�@�}�R�P�́A���`�O���C�h�p�X���M�A���e�i�̑O���n�`�}�ł��B���M�A���e�i����O����S�O�O���܂ł͂قڕ��R�Ȓn�`�������A���̐��S�O�O�������U�O�O���ɂ����Ă͊ɂ₩�ȕW������R���̉����A�܂���U�O�O�������V�O�O���ɂ����Ă͕W�����T���̏���ɂȂ��Ă���A���̐�̖�V�O�O���ȉ��͍Ăѕ��R�ȑ�n�������Ă��܂��B
 |
| �i�d�q�q�@��������No.38������p,�j |
| �}31�D���`�O���C�h�p�X���M�A���e�i�O���n�`�} |
�R�D�Q�D�Q�@���`�O���n�`�̋N���ɂ���Q���g�����O���C�h�p�X�̕Έʓd��
�@���M���g���́A�f�B���N�V���i���n332.305MHz�A�N���A�����X�n332.297MHz�A�p�X�p2.75�x�A�p�X��0.7�x�ł��B
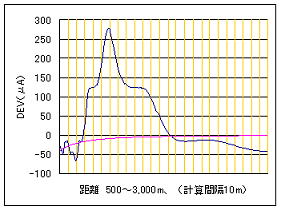
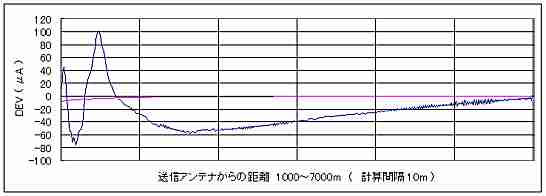
�}32-A�D�͓d�q�q�@��������No.38�ɋL�ڂ���Ă�����`�Q���g�����O���C�h�p�X��ENRI��s�������������ENRI�v�Z�l�ł��B
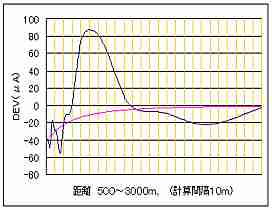
�}32-B�D��AVITEC�̌v�Z�l�ł��B�ψʓd���̑傫���ƕω��̑嗪�̌X���́A�}32-A�D��ENRI��s���������Ƃقڈ�v���Ă��܂��B
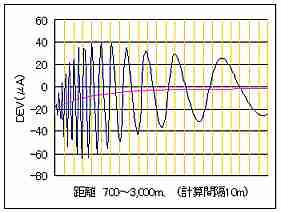
�@�}32-A���Q���g������ENRI��s�������ʂ��}33-A���i�����t�@�����X�����̍q��ǔ�s�����l���r����ƁA�Q���g�����O���C�h�p�X�͍ő���27��A�ł���A�i�����t�@�����X�����͍ő���45��A�ł�������U�O���ɒጸ���Ă��܂��B���̂��Ƃ���Q���g�����O���C�h�p�X�̕����O���C�h�p�X�A���e�i�̑O���n�`�̉��ʂɑ��Č��ʓI�ł��邱�Ƃ��킩��܂��B���̂��ߓ��{�̃O���C�h�p�X�͑S�ĂQ���g�����O���C�h�p�X���ݒu����Ă��܂��B
 |
| �}32-A�D���`�Q���g�����O���C�h�p�X�@ENRI��s�������������ENRI�v�Z�l |
| �i�d�q�q�@��������No.38������p,�j |
 |
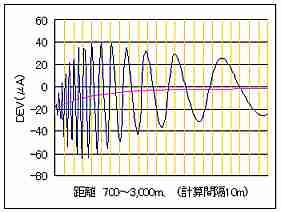
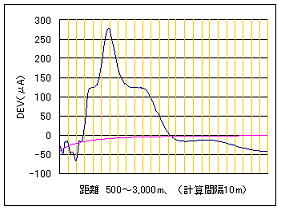
| �}32-B�D���`�Q���g�����O���C�h�p�X�@AVITEC�v�Z�l |
�R�D�Q�D�R�@���`�O���n�`�̋N���ɂ���i�����t�@�����X�����O���C�h�p�X�̕Έʓd��
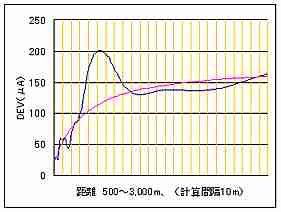
�}33-A�D�͓d�q�q�@��������No.38�ɋL�ڂ���Ă�����`�i�����t�@�����X�����O���C�h�p�X���q��ǔ�s�����L�^�i�����j�����ENRI�v�Z�l�i�j���j�ł��B
�}33-B�D��AVITEC�̌v�Z�l�ł��B
�i�P�j�@���M�A���e�i����P�V�O�O���ȉ��ɂ�����v�Z�l�̍ő�l����T�T��A�ł��B����A�}33-A�D��ENRI��s���������ł͍ő�l����S�T��A�ł��B�A���e�i����P�V�O�O���ȉ��̂����Ă͌v�Z�l�̑傫���Ƒ嗪�̌X���͎����l�Ƃقڈ�v���Ă��܂��B
�i�Q�j�@�������A���M�A���e�i����1000m�`1�V00m�ɂ����ẮA�v�Z�l�̕��������l����T�{���傫���Ȃ��Ă��܂��B���̌����ɂ����d�q�q�@��������No.38�́u�T�D�l�@�Ƃ܂Ƃ߁v�ɂ͎��̂悤�ɏq�ׂ��Ă��܂��B�w�x���͓��҂���̈��p�ł��B
�w���`�ɂ�����i�������O���C�h�p�X�̔�s�����L�^���A���M�A���e�i����1.7�q���߂��Ƃ���ɂ����āA�\���l�ƍ��v���Ă��Ȃ����Ƃ���A�U���ʂɑ��đ��M�_�E��M�_���g���ɑ��ď\���������ƂȂǂ̋ߎ������藧���Ȃ��̈�ɑ��āA�ߎ��v�Z���s���Ă���Ƃ��l������B����A���d���ˁA���ˊp�̕ω��ɂ�锽�ˌW���̕ω��Ȃǂ��܂߂��\���v�Z���s���K�v������B�x
 |
| �}33-A�D���`�i�����t�@�����X�����O���C�h�p�X�@�q��ǔ�s�������������ENRI�v�Z�l |
| �i�d�q�q�@��������No.38������p,�j |
 |
| �}33-B�D���`�i�����t�@�����X�����O���C�h�p�XAVITEC�v�Z�l |
�S�D�@SANE��
| �@ILS�O���C�h�p�X���˖ʂ̂R�����I�ȋN������ё��d�w�ɂ��p�X�����̕ω� |
�@�Q�O�P�O�N�V���ɓd�q���ʐM�w��SANE(�F���q�s�G���N�g���j�N�X)������Ŕ��\�������̊T�v�����L�Ɏ����܂��B
�@�ꕔ�̐}���ɂ͗������₷���悤��������⑫���܂����B�܂��C6.1.3 ���C7.2.1�������8.1�������i�w�i�F�ΐF�����j�͕��ɋL�ڂ͂���܂��C��Ɍ������s���ĕ⑫���������ł��D
�@
���������N
�P�D�͂��߂�
�@�f�r�����犊���H���[�܂ł̒�����R�O�O���C����Q�O�O���̋��́C��ԂɃO���C�h�p�X�U���H���`�����邽�߂Ɋ�Ɋ�Â����R�ɐ��n�����D�k8�l
�@�������Ȃ���C�^�p�㓙�̗��R�ɂ�萮�n�����̂R�����I�ȋN�����������Ȃ��Ƃ�������D���̂悤�ȏꍇ�̃p�X�����̃V�~�����[�V�����͌�������Ȃ��D
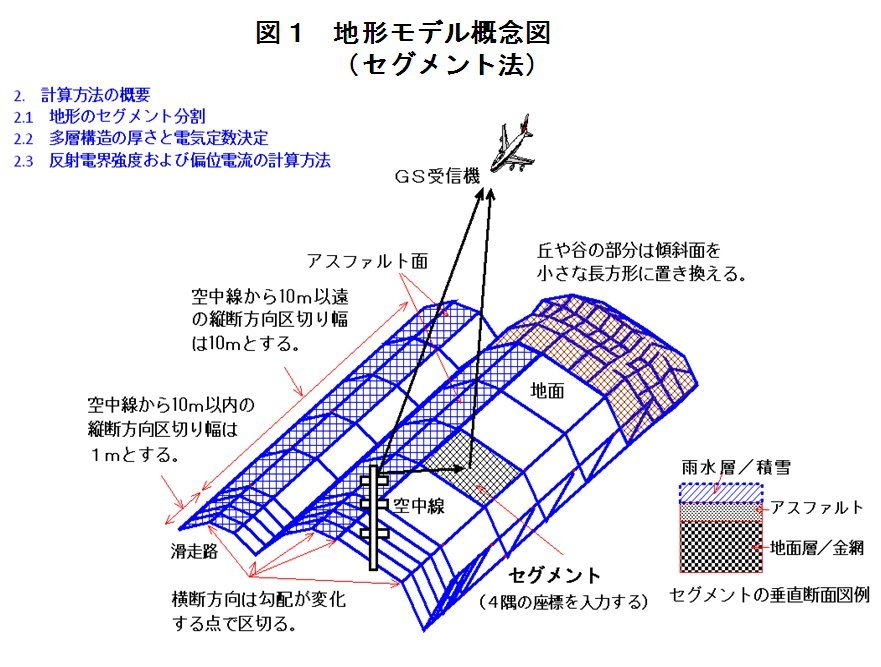
�@����C�R�����I�ȋN��������C�����˖ʂ����n�C���n�C�A�X�t�@���g�ʁC�J���w�C�ϐᓙ�̑��d�w�ō\�������Ƃ��C���˖ʂ𑽐��̃Z�O�����g�ɕ������ăp�X�������v�Z�����Z�O�����g�@�ɂ��s�����̂ŊT�v�����D
�Q.�@�v�Z���@�̊T�v
�Q�D�P�@�n�`�̃Z�O�����g����
�}�P�ɒn�`���f���̊T�O�}�������D�܂����������P�����݂̒n�`�}�ɂ�胂�f��������͈͂����߂�D���W���_�i�O�C�O�C�O�j�͊����H���[�Ɗ����H���S���̌�_�Ƃ���DX���͊����H�c�f�����CY���͉��f�����CZ���͏������Ƃ���D
�@���f�����͊����H���S���iY=0m�j�������ʂ��`���E�iY=�|�Q�O�O���j�܂ł̖�Q�O�O���Ƃ���D�c�f�����͋��ʒu�i��|�R�P�O���j���炘���P�O�O���`�P�O�O�O���Ƃ���D
�@�I�������͈͓��̒n�`���`�̃Z�O�����g�ɕ������S���̂R�������W��ǂݎ��D�����H�c�f�����́C������P�O���ȓ��͂P�����݁C����ȉ��͌����Ƃ��ĂP�O�����ݒ��x�ŕ�������D���f�����́C���f���z���ω�����_�C�i��������_�C�n�\�ʂ̓d�C�萔���ς��_���ŕ�������D�u��J�̕����͒n�\�ʂɉ����ď����Ȓ����`�Z�O�����g�ɕ�������D���f��������͈͂ɂ��قȂ邪�C�Z�O�����g�����͂W�O�O�`�P�O�O�O���x�ƂȂ�D
�Q�D�Q�@���w�\���̌����Ɠd�C�萔����
�Z�O�����g���ɁC�������������w�\���̊e�w�̌�������ѓd�C�萔�i���f��U�d���C���d���j�����������̓f�[�^���쐬����D
�Q�D�R�@���˓d�E���x����ѕΈʓd���̌v�Z���@
�P�̃Z�O�����g������d�E���x�̌v�Z�́C�O���C�h�p�X�X�P�[�����f�������C�����g��s�������o�Č��؍ς݂��L���q�z�b�t�E�z�C�w���X�̌����Ɋ�Â��������w�I��@��p�����D�k1�l
�@�܂��C���d�w����̕��f���ˌW���͕��z�萔���_���瓱���ꂽ�v�Z����p�����D�d�g�z���̂̐v���ɗp�����Ă��肻�̗L�p���͎�����Ă���D�k7�l
�@�q��@�̈ʒu���ɑS�ẴZ�O�����g����̔��˓d�E���������C�Έʓd���l�i�ȉ�DEV�Ə̂���D�j���v�Z�����D���˓d�E���v�Z�ɂ����艺�L�̏�����݂����D
�i�P�j�C�ӂ̃Z�O�����g���瑗�M�������ʂ��ł��Ȃ��Ƃ��͌v�Z���珜���D
�i�Q�j�C�ӂ̃Z�O�����g�����M���i�q��@�j�����ʂ��ł��Ȃ��Ƃ��͌v�Z���珜���D
�i�R�j�Z�O�����g����̔��˂͂P��݂̂Ƃ��C���d���˂͍l�����Ȃ��D
�R�D�@�e���@�ƃZ�O�����g�@�ɂ�����X�g���N�`���v�Z���ʂ̔�r
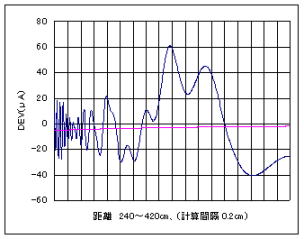
�}�Q�́C���ˌW���|�P�̂Ƃ��̉e���@�ƃZ�O�����g�@��DEV�v�Z�l�̔�r�ł���D�Z�O�����g�@�ł͏c�f�����̕��R��撷���T�O�O���C�P�O�O�O���C�P�S�O�O���̂R�ʂ�Ƃ����D
�@�e���@�ɂ����Ă͖����̕��ʂ����肵�Ă��邽�ߋ����̑����ƂƂ��ɂO�ʂ`�Ɏ������C����DEV�̐U���͐����Ȃ��D
�@�Z�O�����g�@�ɂ����Ă͗L���̔��˖ʂ�p���Ă��邽�ߋ����̑����ɔ����Ĕ��˓d�E���x�ƈʑ����ω����C�c�����̕��R�����Z���قǃO���t�́{�����ɃV�t�g����X��������D�܂�DEV�������ɔ����U������D
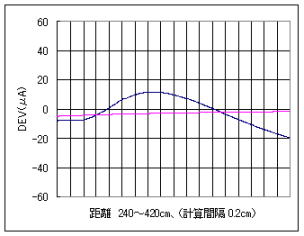
�@�}��̊��ʓ������p�X�p���L�������D�]�[���Q�i�����H�i���[�����P.�O�T��������V.�S�����̊��j�̃X�g���N�`���͎��p�X�p�ŕ]�������D�R���s���[�^�E�V�~�����[�V�����ł́C�X�g���N�`���v�Z�Ɠ����Ɏ��p�X�p���v�Z�����D
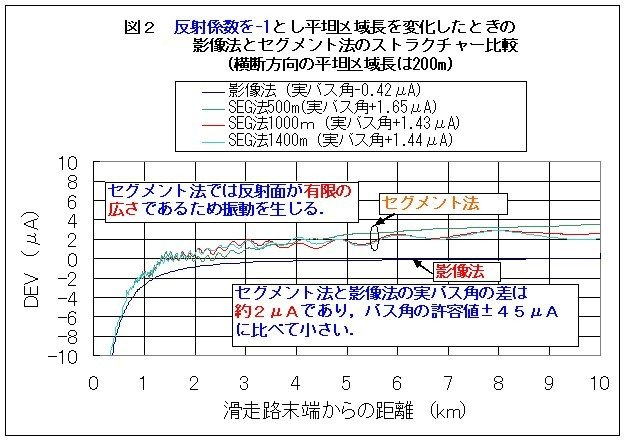
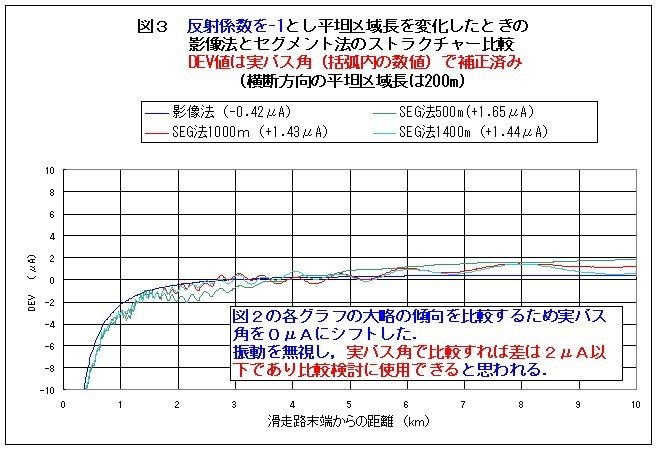
�@�}�R�́C�}�Q�̌v�Z�l�����p�X�p�ŕ�������̂ł���C�}�Q�̊e�O���t�̎��p�X�p���O��A�ɃV�t�g���Ă���D�Z�O�����g�@�Ɖe���@�̎��p�X�p���͖�Q�ʂ`�ł���D
�@�O���C�h�p�X���u�̏����͉��L�̒ʂ�ł���D�����g���g���R�R�Q.�OMHz�C2���g�����C�p�X�p�R�x�C�p�X���O.�V�Q�x�C���ݒu�ʒu�@�w���|�R�P�S���C�x���|�P�Q�O���C�����H�[�ʉߍ��x�P�U.�T���D
4. ���̂ƃA�X�t�@���g�i����10�����j�̑��d�w�ɂ��X�g���N�`���̉�͗�
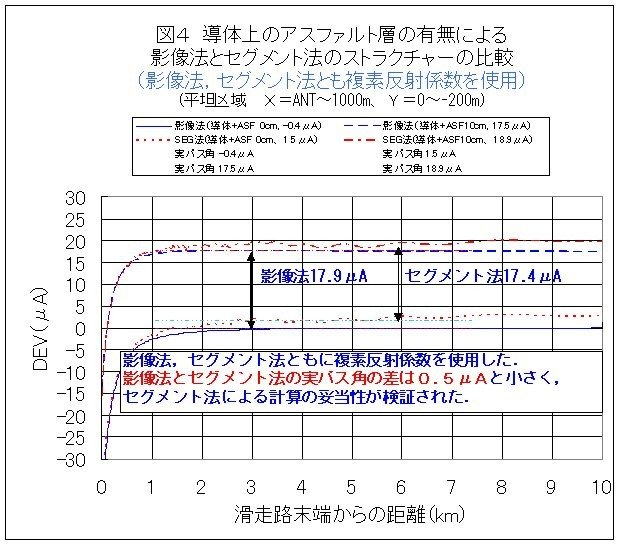
�@�@���́i1-j90000�j�ƃA�X�t�@���g�i5.06-j0.12�j�̑��d�w�ɂ��āC�A�X�t�@���g�w�ɂ��DEV�ω����Z�O�����g�@�ɂ��v�Z����D�v�Z���ʂ��}�S�Ɏ����D
��͂̎菇�͎��̒ʂ�ł���D
�i�P�j���݂̂̂ɂ��X�g���N�`���i�_���j�Ǝ��p�X�p�i�P.�T�ʂ`�j�����߂�D���̒l����l�ƂȂ�D
�i�Q�j���̂ƃA�X�t�@���g�̑��d�w�ɂ��X�g���N�`���i�P�_�����j�Ǝ��p�X�p�i�P�W.�X�ʂ`�j�����߂�D
�i�R�j�A�X�t�@���g�̑��݂ɂ��DEV�ω��́C��L�i�Q�j�Ɗ�l�i�P�j��DEV���P�V.�S�ʂ`�ƂȂ�D
�@�@�}�S�ɂ͎Q�l�̂��߉e���@�ɂ��v�Z����������D�e���@�ł́C��L�̃Z�O�����g�@�Ɠ����菇�ɂ��C�A�X�t�@���g�̉e���͂P�V.�X�ʂ`�ƂȂ�D�Z�O�����g�@�Ɖe���@�̍��͂O.�T�ʂ`�Ə��������Ƃ���C�Z�O�����g�@�ɂ��v�Z�̑Ó������킩��D
5. ��n�̓d�C�I�����ƃX�g���N�`��
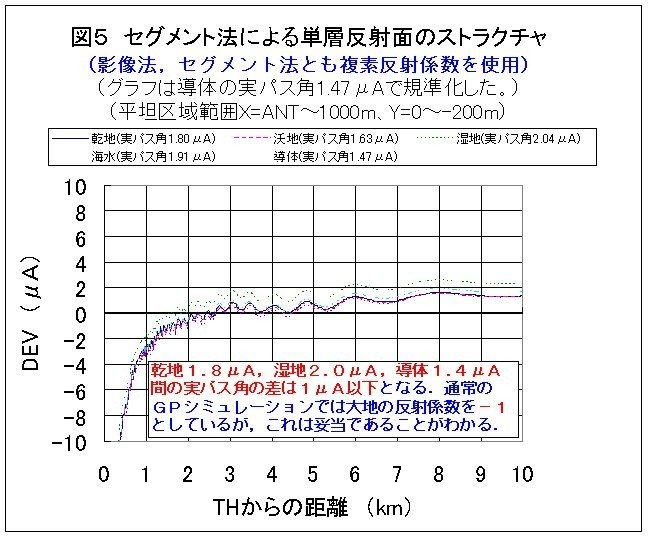
�@�}�T�ɁC�d�C�I�����̈قȂ�T��ނ̂P�w���˖ʂɂ��X�g���N�`���������D�O���t�͓��̂̎��p�X�p �P.�S�V�ʂ`�ŋK���������D��U�d���́C���n4.0-j0.054�C�@���n10.0-j0.108�C���n12.0-j12.0�C�C��81.0-j216.0�C����1-j90000�Ƃ��C�w�̌����͖�����Ƃ����D
�@�P�w�̊��n�C���n����ѓ��̊Ԃ̎��p�X�p�̍��͂P�ʂ`�ȉ��ƂȂ�D�ʏ�̌덷�V�~�����[�V�����ł́C��n���ˌW�����|�P�Ƃ��Ă��邪����͑Ó��ł���D
6. �J���w�ɂ��p�X�����̕ω�
6.1. �J���w�ɂ�鉓���E�p�X�����̕ω�
6.1.1�@���n��ɃA�X�t�@���g�w������Ƃ�
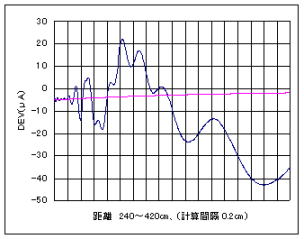
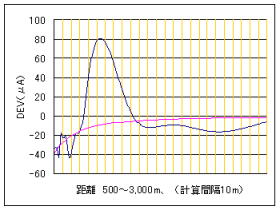
�@�}�U�ɁC���n��ɃA�X�t�@���g�w������Ƃ��̉J�����K����DEV�������D�J���̔�U�d����25.0-j1.0�ł���D��M�_�͂T.�Q�����C�f�o�R�x��ł���D���ʓ��̓d���l�͉J�����O�����ł̕�ODEV�l�������D�J�����̑����ɔ���DEV���������ɑ������C�O���C�h�p�X������ɃV�t�g���邱�Ƃ��킩��D
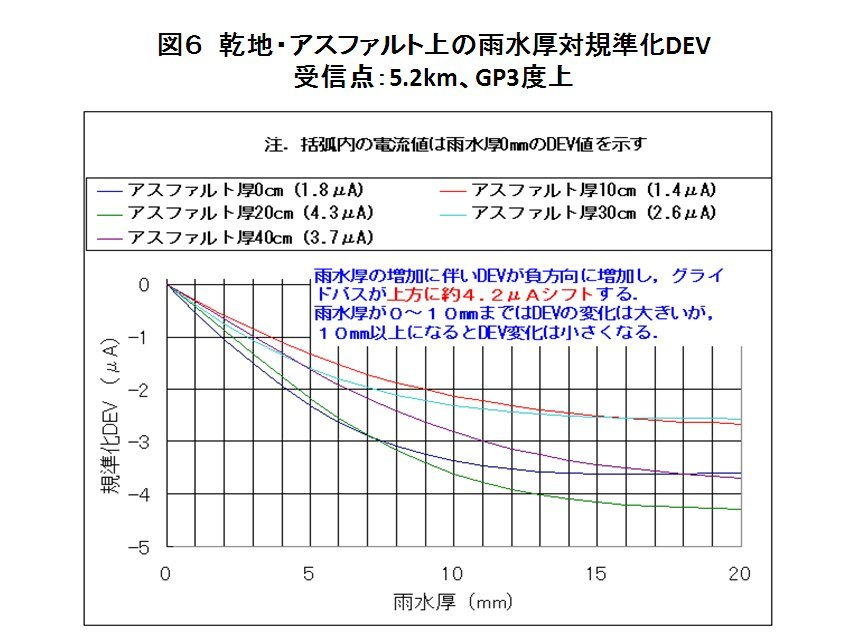
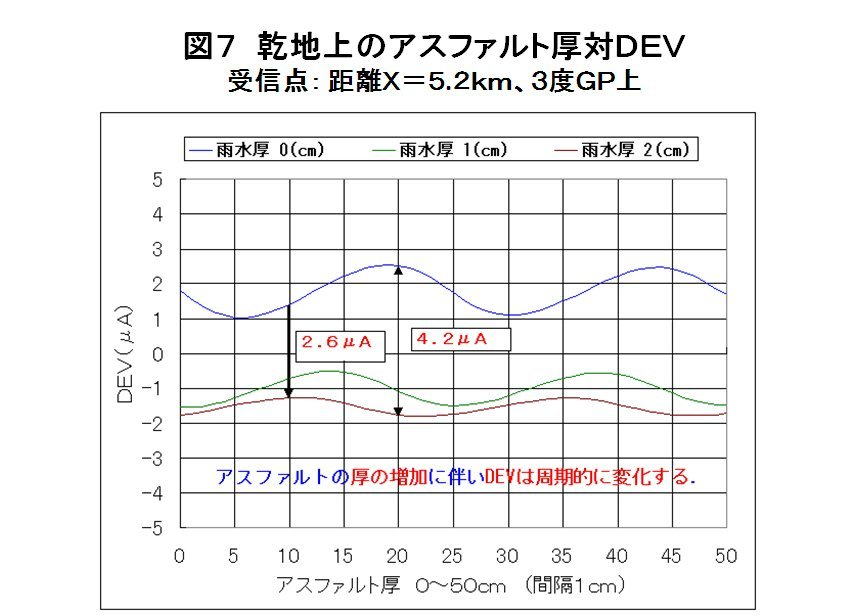
�@�}�V�ɁC���n��ɃA�X�t�@���g�w������Ƃ��̃A�X�t�@���g����DEV�������D��M�_�͐}�U�Ɠ����ł���D�}�U�Ɛ}�W���r����ƁC���n��͎��n����ő�Ŗ�P.�T�ʂ`����DEV�ω��͏��������Ƃ��킩��D
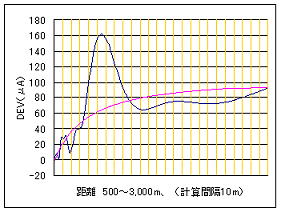
6.1.2�@���n��ɃA�X�t�@���g�w������Ƃ�
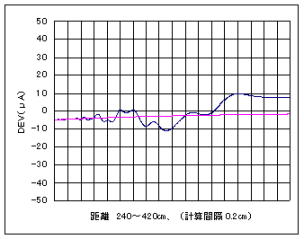
�@�}�W�ɁC���n��ɃA�X�t�@���g�w������Ƃ��̉J�����K����DEV�������D��M�_�͂T.�Q�����C�f�o�R�x��ł���D���ʓ��̓d���l�͉J�����O�����ł̕�ODEV�l�������D
�@�J�����̑����ɔ���DEV���������ɑ������C�O���C�h�p�X������ɃV�t�g���邱�Ƃ��킩��D�}�U�Ɛ}�W���r����ƁC���n��͊��n���ő�Ŗ�P.�T�ʂ`����DEV�ω��͑傫�����Ƃ��킩��D
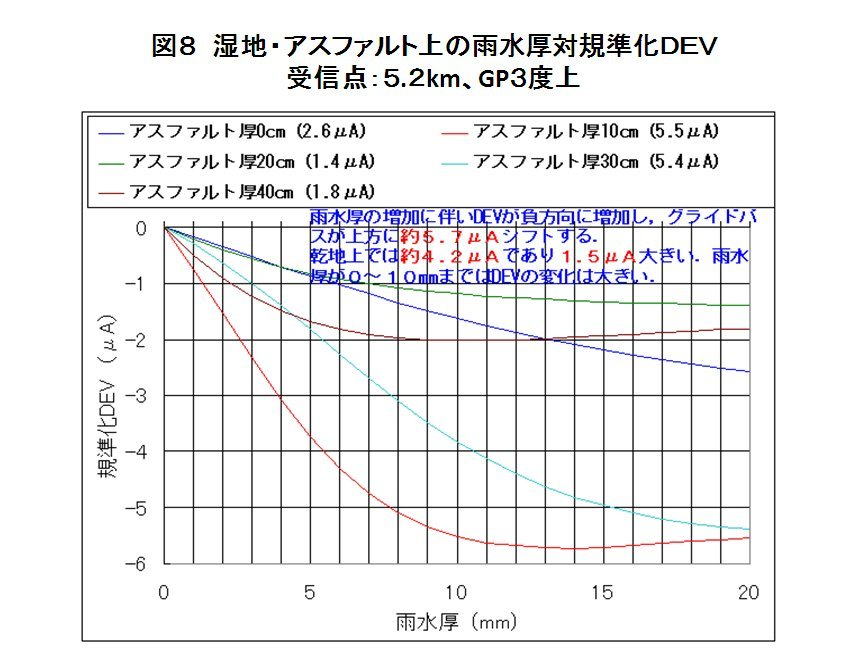
�@�}�X�ɁC���n��ɃA�X�t�@���g�w������Ƃ��̃A�X�t�@���g����DEV�������D��M�_���}�W�Ɠ����ł���D
���n��ɃA�X�t�@���g�w������Ƃ��̉J���ɂ��DEV�ω���,�A�X�t�@���g�����P�T�����`�Q�Q�����̂Ƃ��Q�ʂ`�ȉ��Ə������Ȃ�,�T�����`�P�O�����̂Ƃ���T�ʂ`�Ƒ傫���Ȃ�D
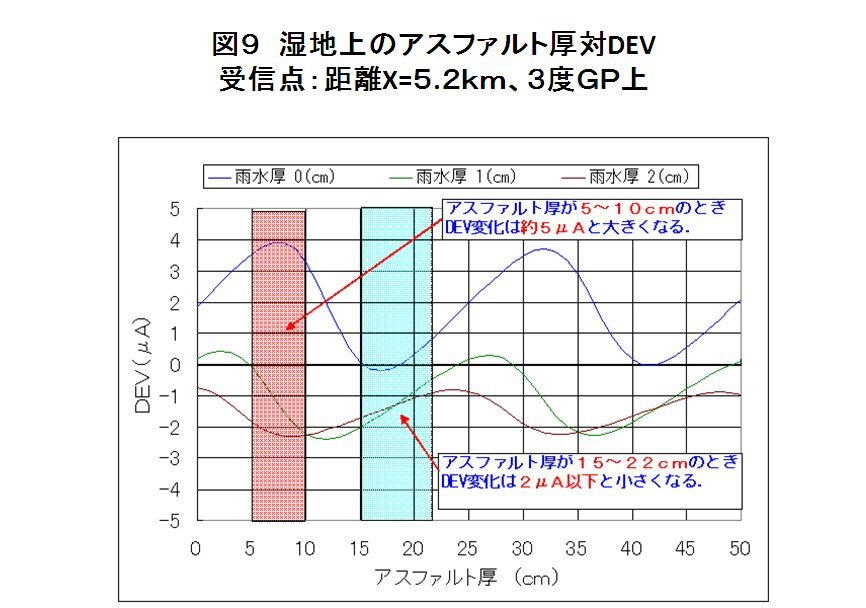
6.1.3�@���̏�ɃA�X�t�@���g�w������Ƃ�
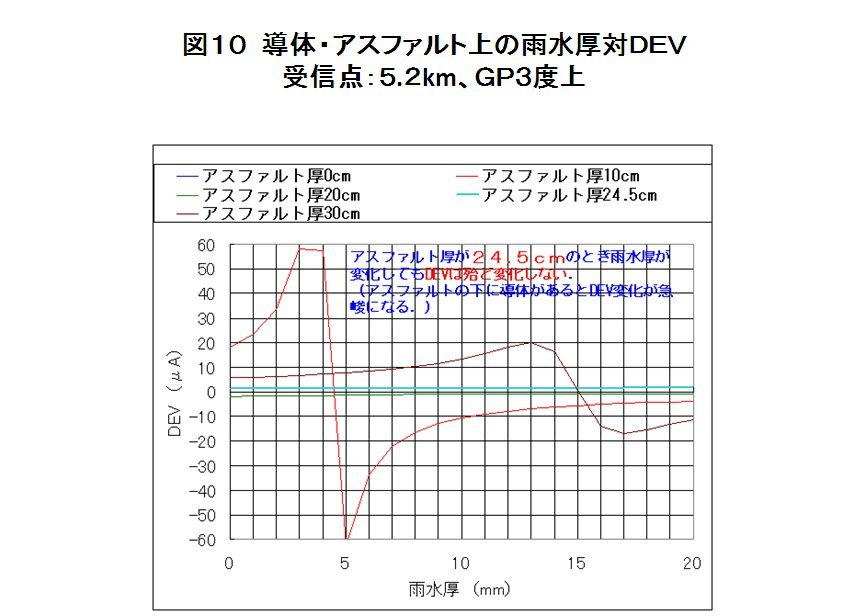
�@�}�P�O�ɁC���̏�ɃA�X�t�@���g�w������Ƃ��̉J������DEV�������D��M�_���}�W�Ɠ����ł���D
�A�X�t�@���g�����P�O�����i���F���j�̂Ƃ�,�J�������R�`�T�����Ł}�U�O�ʂ`�̑傫��DEV�ω�����D
�@���̏�ɃA�X�t�@���g�w������Ƃ��A�X�t�@���g�����Q�S.�T�����i��F���j�̂Ƃ��J�������ω����Ă�DEV�͖w�Ǖω����Ȃ��D
| ���D(2010.8.17�NjL) �@�{���̌����������S���u�C���`�̒n�ʍ\���ɂ��ILS�O���C�h�p�X�ւ̉e���̌y�����@�v�̃��r���[�ł���D�����S�ł͍œK�A�X�t�@���g�����Q�Q�����Ƃ��Ă���D�}�P�O�Ɏ����悤���A�X�t�@���g�����Q�O�����`�Q�S�D�T�����ɂ����ẮC�J�������O�`�Q�Omm�ω����Ă��c�d�u�ω��͂P��A�ȉ��ł���D���������āC���̕��ƕ����S�̌��_�͂قڈ�v���Ă���Ƃ�����D |
6.2. �J���w�ɂ�郂�j�^�ʒu�p�X�����̕ω�
6.2.1 ���̏�ɃA�X�t�@���g�w������Ƃ�
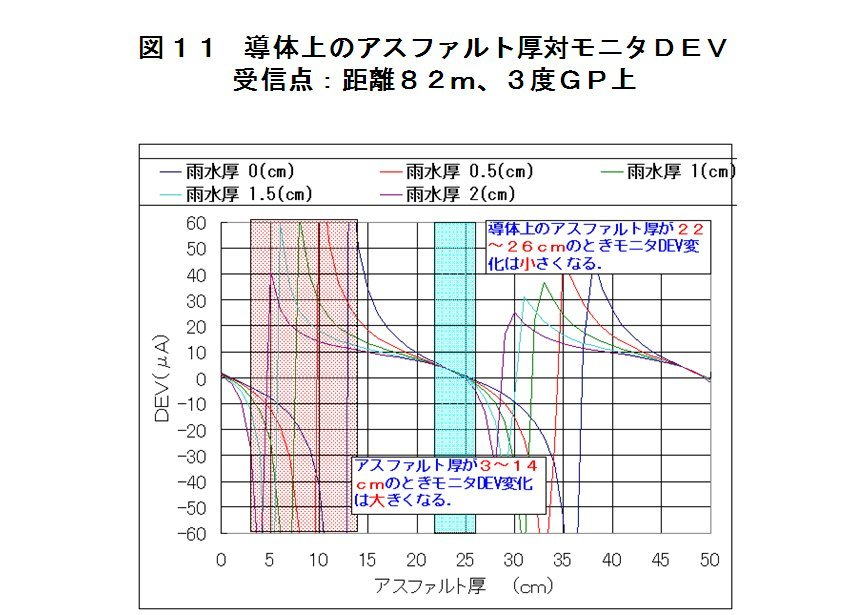
�@�}�P�P�ɁC���̏�ɃA�X�t�@���g�w������Ƃ��̉J�������j�^DEV�������D
�@DEV�̓A�X�t�@���g�������O�����̒l�ŋK�������Ă���D
�@��M�_�͋�����W�Q���CGP�R�x��ł���D
�@���j�^���˔͕��T�O���C�����P�T�T���ł���D���̂̉e���ɂ��A�X�t�@���g���ɑ���DEV�͑傫���ω�����D
�@���̏�̃A�X�t�@���g�����Q�S�}�Q�����̂Ƃ�DEV�ω��́}�R�ʂ`�ȉ��ƂȂ�D�A�X�t�@���g�����U�����̂Ƃ��͉J�����ɑ���DEV�ω����傫���Ȃ�D
7. �ϐ�w�ɂ��p�X�����̕ω�
�@��ʂɁC�ϐ�w�̐Ꮏ�͐��������ɕω����Ă���C��U�d���̈قȂ������w�\�����Ȃ��Ă���D�����̔�U�d���͎��ԓI�ɕω���,�܂��~�J����Ƃ�����ƕ\�ʂ̔�U�d�����ω�����B�k3�l
�@�{�ł͂P�w�\���̐ϐ�̉����E��GS���j�^�ʒu�ɂ�����p�X�����̌v�Z��ɂ��Ăׂ̂�B
7.1. ���n��̐ϐ�w�ɂ�鉓���E�p�X����
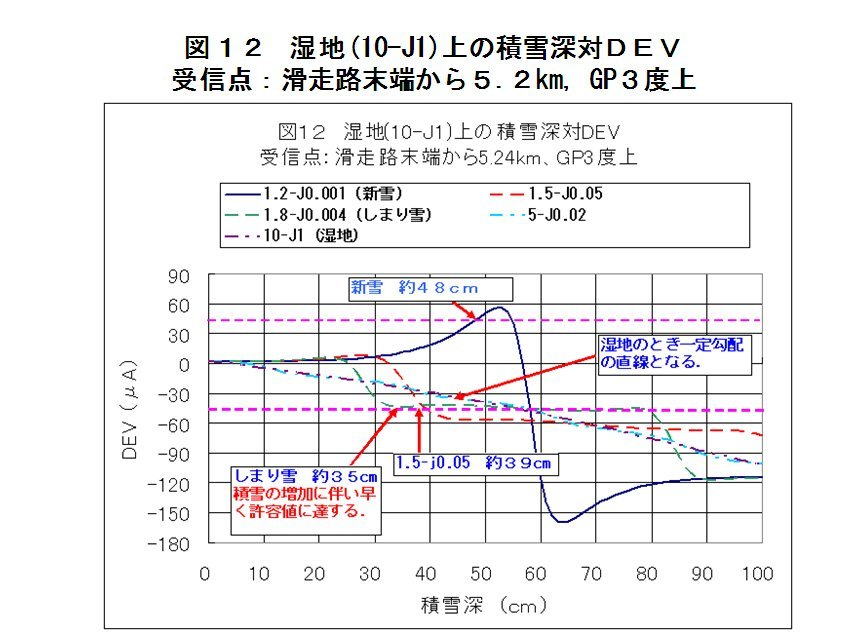
�@�}�P�Q�ɁC���n��̂T��ނ̔�U�d���̐ϐ�w���ɂ��ϐ�[�Ή����EDEV�����������D��M�_�͂T.�Q�����CGP�R�x��ł���D
�@���n�i10-j1�j�̓����͂قڒ����ƂȂ�,���̋Ȑ��͎��n�̒����ɑ��Đ����Ώ̓I�ɕω����Ă���D
�p�X�p�̋��e�l�}�S�T�ʂ`�i�}7.5%�C�}0.225�x�j��������ϐ�[��,���܂��i1.8-j0.004�j�̂Ƃ���R�T����,���Ԃ̐Ꮏ(1.5-j0.05)�̂Ƃ���R�X����,�V��(1.2-j0.001)�̂Ƃ���S�W�����ƂȂ�D�]���āC���܂��ɑ��ē��ɒ��ӂ��K�v������D
7.2. ���̂ƃA�X�t�@���g�̑��d�w��̐ϐ�ɂ�郂�j�^�ʒu�p�X����
7.2.1 �A�X�t�@���g�����j�^DEV����
�@�}�P�R�͓��̂ƃA�X�t�@���g�w��̐ϐ�[���R�O�����Ƃ����Ƃ�,�R��ނ̔�U�d���ɂ��ẴA�X�t�@���g�����j�^DEV�����������D�R�O������I�肵�����R�́C7.2.2�ŋL���悤�Ƀ��j�^�̋��e�l�ɑ���ՊE�I�Ȓl�ł��邱�ƁC����э����Ȃ̏����Œ�߂Ă���l�ł��邱�Ƃ̂��߂ł���D��M�_�͂W�Q���C�f�o�R�x��ł���D
�@�}�P�R����C�ϐ�[���R�O�����̂Ƃ��C�R��ނ̔�U�d���ɑ���DEV�ω����ŏ��ƂȂ�A�X�t�@���g������P�T�����ƂȂ邱�Ƃ��킩��D
�@�ϐ�ʂɍ~�J���������Ƃ��C���j�^�ő傫�ȕΈʂ����o����邱�Ƃ�����D������ϐ��w�ʂ̔�U�d�����P�D�U�i�������j���x�ɋ}�ς��邱�Ƃɂ���D�i�����R�C�}�T�C�i���j�Q�Ɓj
�@�]�������j�^��������艻���邽�߂ɂ́C��ʂ̔�U�d�����ω����Ă����j�^DEV�̕ϓ������Ȃ����Ƃ��D�܂����D���̂悤�ȗ��R�ɂ��A�X�t�@���g�����P�T�����t�߂ɐݒ肷�邱�Ƃ͗L���ł���ƍl������D
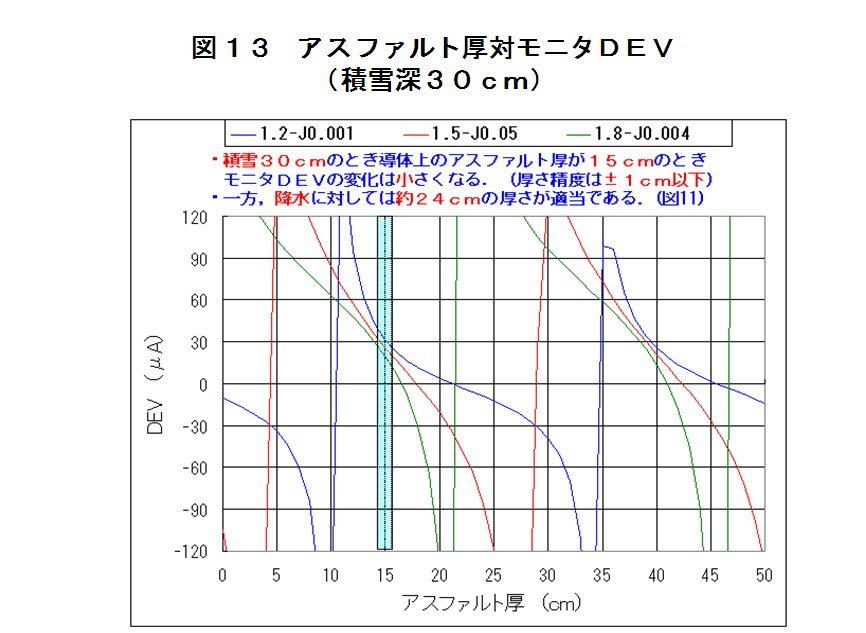
| �@ ���D(2010.8.17�NjL) �@�����U�@�u�Z��ϓ����ŏ�������f�o���j�^�����v�ł́C�A�X�t�@���g�ʏ���Z��̌������S�����ɐݒ肵�C��U�d���i�������j���P�`�Q�O�܂ŕω�������U�d����DEV�����i�p�����[�^�E�A�X�t�@���g���j���v�Z���CDEV�ϓ����������Ȃ�œK�A�X�t�@���g�����P�U�`�P�W�����ł���ƋL���Ă���D�k�����U�C�}�T�Q�Ɓl �܂��C�����U�́C�Ⴊ�Z����Ƃ��C��U�d�����w�V��i�Áf���P�D�T�j���Z���o���i�Áf���S�j���V���[�x�b�g��ԁi�Áf���U�j�����i�Áf���P�O�j�x�ƕω�����ƋL���Ă���D�k�����U�C �R�D�P���Q�Ɓl �@�}�P3-2��AVITEC�ɂ�����v�Z�l�ł���D�ϐ�[���S�����Ƃ��C�T��ނ̔�U�d��1.2-j0.001�C1.5-j0.05�C1.8-j0.004�C5-j0.02�C10-j1�ɂ��Ă��A�X�t�@���g����DEV�����ł���DDEV�ϓ����������Ȃ�œK�A�X�t�@���g��������Q�Q�D�T�����ƂȂ����D �@�}�P3-2�́C�ϐ�[�S�����łT��ނ̔�U�d���̓����ł���C�}�P�P���~�����O�`�Q�����Ŕ�U�d���Q�T-j1�̓����ł��邪�C���O���t�̑S�ʓI�ȌX���͂���߂Ă悭���Ă������Ƃ��킩��D �@ �@�}�P3-2�������U�̃A�X�t�@���g���P�U�`�P�W�����Ă͂߂Ă݂�DDEV�ω����̓A�X�t�@���g���P�U�����̂Ƃ���P�O��A�C�P�W�����̂Ƃ���Q��A�ł���D���e�l�S�T��A�ɑ��čő�ł���Q�T���ł����r�I�������l�ł��邱�Ƃ��킩��D �@�����U��AVITEC�̍œK�A�X�t�@���g���ɂ͎�̍������邪�C ���̍��̌����́C�v�Z��@�̍��i�����S�͂f�s�c�@�CAVITEC�̓Z�O�����g�@�j�ɂ���̂����m��Ȃ��D���コ��Ɍ����������D 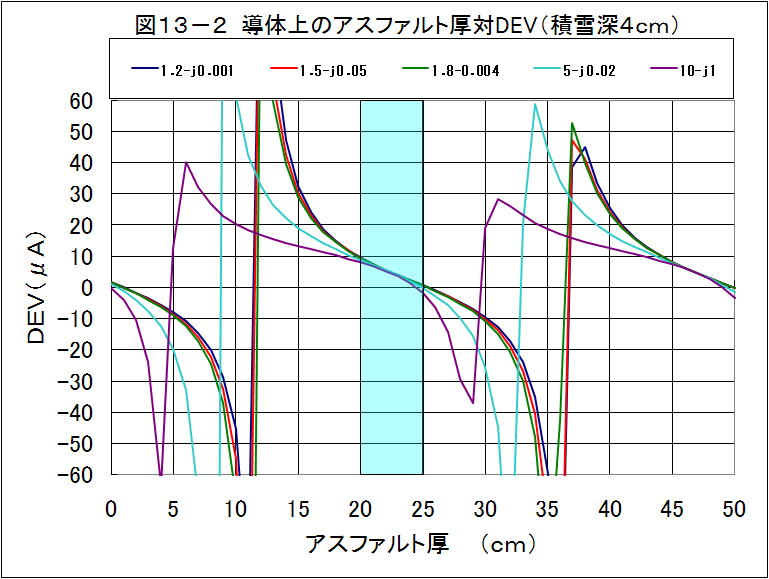 |
7.2.2 �ϐ�[���j�^DEV����
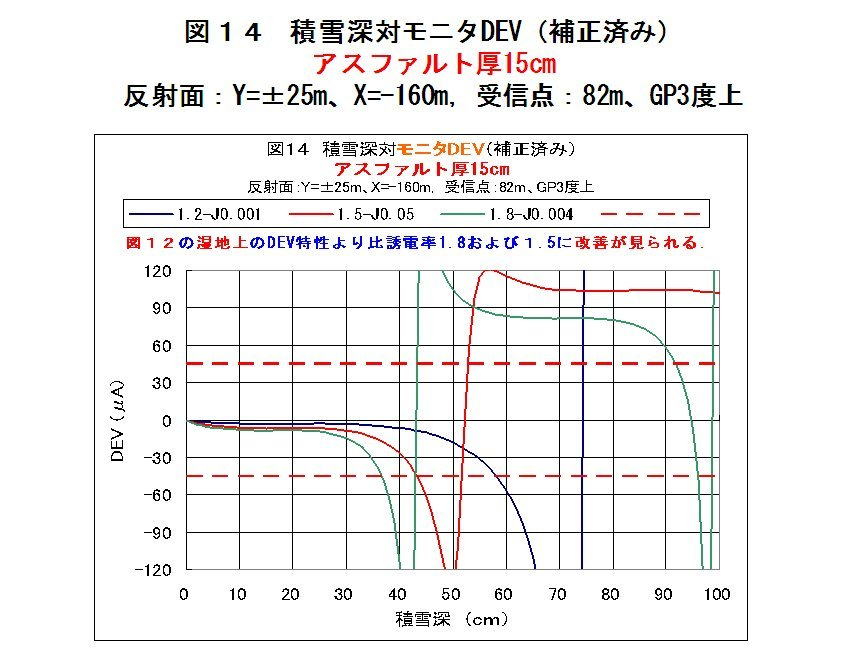
�@�}�P�S�ɁC���̂ƃA�X�t�@���g�ʏ�̂R��ނ̔�U�d���ɂ��ϐ�[���j�^DEV�����������D��M�_�͂W�Q���CGP�R�x��ł���D���˖ʂ͕��T�O���C�����P�T�T���C�A�X�t�@���g���͂P�T.�O�����ł���D
�@���j�^DEV�ł̃p�X�p�̋��e�l�}�S�T�ʂ`�i�}7.5%�C�}0.225�x�j��������ϐ�[��,���܂��i1.8-j0.004�j�̂Ƃ���R�U����,���Ԃ̐Ꮏ(1.5-j0.05)�̂Ƃ���S�R����,�V��(1.2-j0.001)�̂Ƃ���T�W�����ƂȂ�D
�@�]���āC���܂��ɋ߂���U�d�������ϐ�ɑ��Ă͓��ɒ��ӂ��K�v������D
�@�}�P�S�̐ϐ�[��DEV�����Őϐ�[���O�`�R�O�����̊Ԃ̗����オ������̓A�X�t�@���g���ɂ��傫���ω����邱�Ƃ��v�Z�ɂ��킩�����D
�@�ȏ�̑嗪�̌����ɂ��C���̏�ɃA�X�t�@���g�w������Ƃ����œK�A�X�t�@���g���́C�J���w�i�������Z���`�ȓ��̐ϐ�w����їZ��w�������j�ɑ��Ă��}�P�P�����Q�S�����ł���,�ϐ�w�i������R�O�����j�ɑ��Ă��}�P�R�����P�T�����ł���D�J���Ɛϐ�ɑ���œK�A�X�t�@���g���͈قȂ邽�ߐݒu�n��̋C��ɉ������l�����K�v��������Ȃ��D���J�n���ł̓G�L�X�p���h���^�����˔��̎g�p���D�܂�����������Ȃ��D
8. ����ɂ��p�X�����̕ω�
8.1. �����敽�ʐ}
�@�}�P�T�ɁC�����敽�ʐ}�������D�O�x,�}�Q�x,�}�W�x��LLZ�R�[�X��X=1.05km�̂x���ɕ��s�Ȑ��Ƃ̌�_�̂f�r������̕��ʐ����L�������D
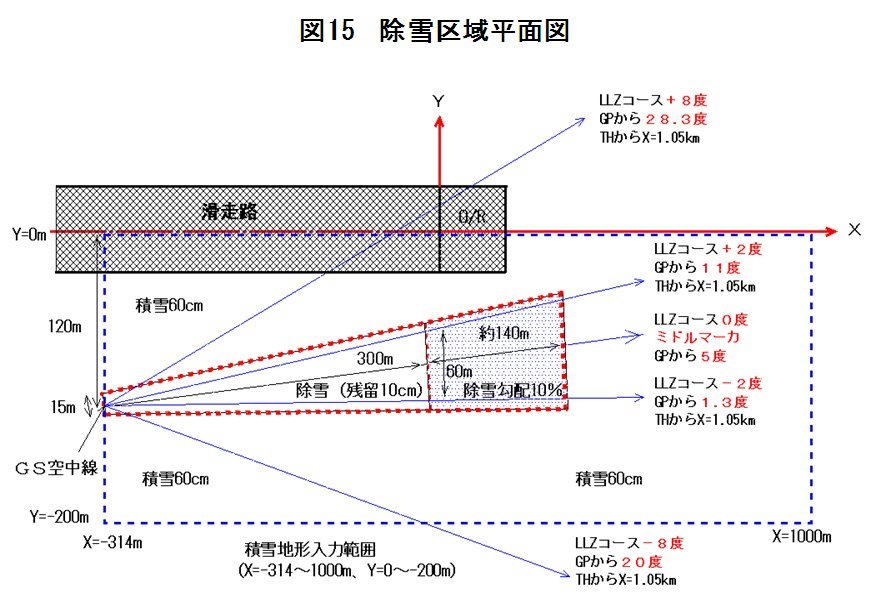
| �@���D(2010.8.17�NjL) �@�}�P�T-�Q�ɁC������R�c�}�������D �@�n�`���̓f�[�^�́C�P�O�O�O�߂��̃Z�O�����g���ɂS���̂R�������W�l����͂��邪�C�f�[�^���̓~�X�͋N���肦��ƍl������D���̂����R�c�}�쐬�\�t�g�iSurfer�X�j�ɂ��`�悵�ĂR�c���̓f�[�^���m�F����D�O���b�h�`��C�������}�`���̒P�Ƃ���яd���\�����\�ł���D ������̕`��}�ł����Ă��}�E�X��p���Đ}�`����]���Ă������������m�F�ł��֗��ł���D �@�}����ϐ�ʍ��U�Ocm�C�����H�ʏ���㍂�Ocm���m�F�ł���D �@�f�r���O���̑�`�̏���͈͂́C�}�P�T�Əƍ������O/R���̏�����z�P�O���̈ꕔ���قȂ��Ă��邱�Ƃ��킩��D �@���̂悤�ɂ��ē��̓f�|�^���Ӑ}�����l�ɂȂ��Ă��邩�ǂ������m�F�ł���D 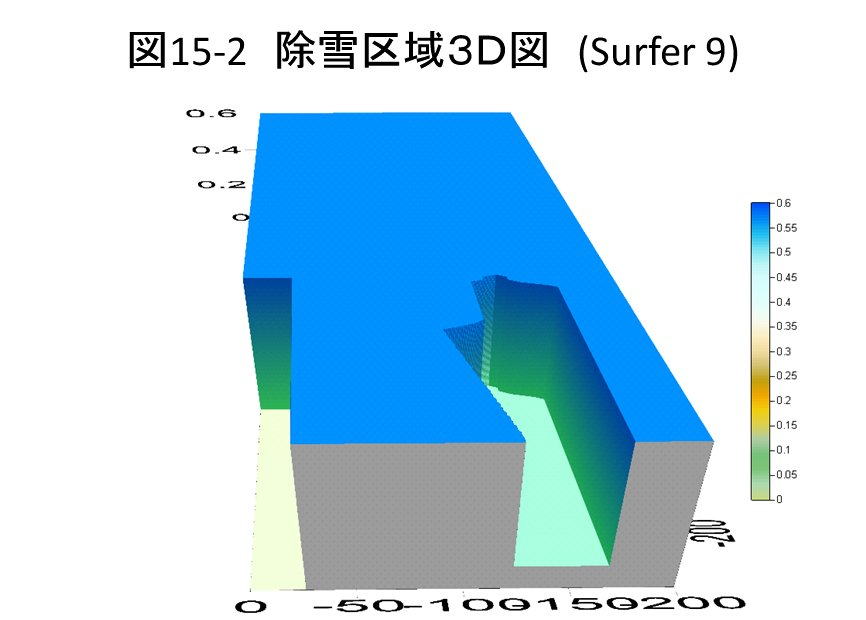 |
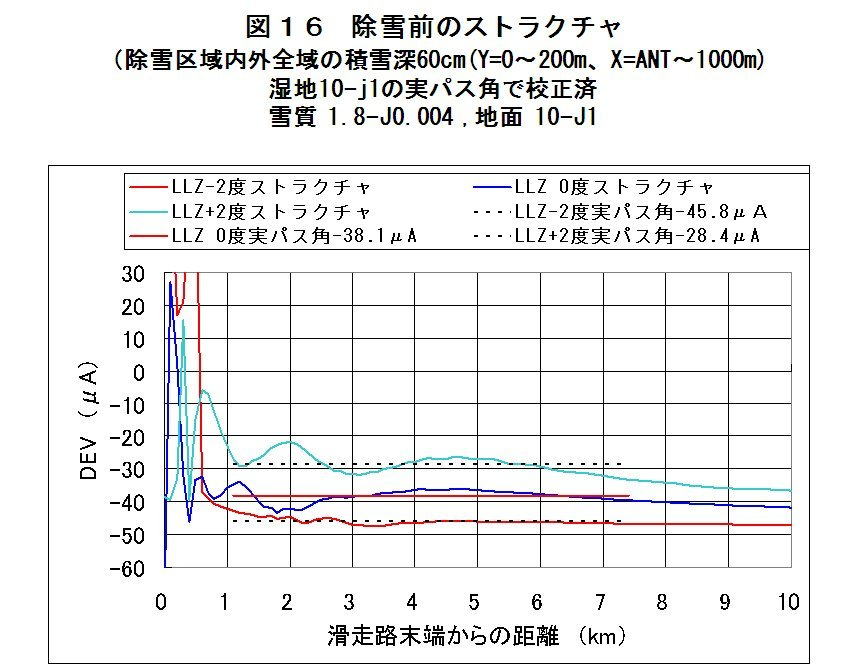
8.2. ����O�̃X�g���N�`��
�@�}�P�U�ɁC�Q�O�O���~��P�R�O�O���̒����`���������܂��i1.8-j0.004�j���ψ�ɂU�O�����ϐႵ�Ă����Ƃ��̃Z�O�����g�@�ɂ��X�g���N�`���������D�O���t�͎��n(10-j1)�̎��p�X�p�ŕ�ς݂ł���D���p�X�p��LLZ�R�[�X�|�Q�x�Ł|�S�T.�W�ʂ`,LLZ�R�[�X�O�x�Ł|�R�W.�P�ʂ`,LLZ�R�[�X�{�Q�x�Ł|�Q�W.�S�ʂ`�ƂȂ�C�|�Q�x�ł��p�X�p���e�l�S�T�ʂ`��������D
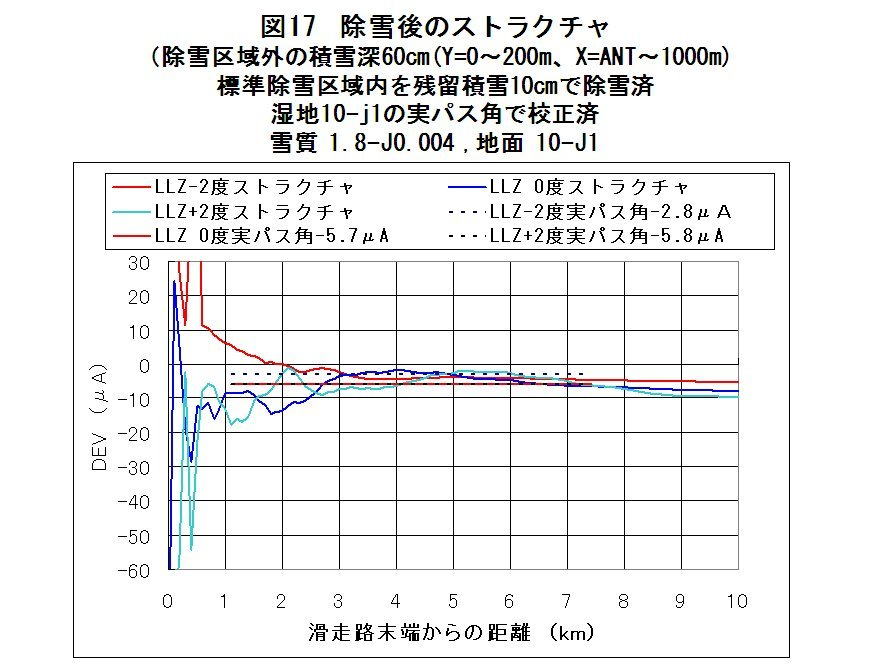
8.3. �����̃X�g���N�`��
�@�}�P�V�ɁC�}�P5��������R�O�O���܂ł̑�`�̏���������c���ϐ�P�O�����ɏ��Ⴕ,���̐�P�S�O�����P�O���̌��z�ŏ��Ⴕ���Ƃ��̃Z�O�����g�@�ɂ��X�g���N�`���������D���p�X�p��LLZ�R�[�X�|�Q�x�Ł|�Q.�W�ʂ`,LLZ�R�[�X�O�x�Ł|�T.�V�ʂ`,LLZ�R�[�X�{�Q�x�Ł|�T.�W�ʂ`�ƂȂ�Έʂ͉��P�����D
9. �܂Ƃ�
�@��������Z�O�����g�@�͉��L�̓��������D
�i�P�j���˖ʂ��R�����I�ȋN���������C�����ʂ���ѐ����ʂɂ����Ēn�ʁC�A�X�t�@���g�C�J���C�ϐᓙ�̑��w�ʂō\�������Ƃ��̃p�X�����\���v�Z���ł���D
�i�Q�j�n�`�f�[�^�̍쐬�ɂ͎��Ԃ�v���邪�C��x�쐬����Δ�s�f�[�^�̕ύX�ɂ��X�g���N�`���C�V���g���C�`���g�C�p�X������e�ՂɌv�Z�ł���D
�i�R�j���j�^����͈́C���j�^����уt���l���]�[�����œK�A�X�t�@���g���C�n�`���n�v���̌������ł���D
����A�V�~�����[�V�����̐��x������͂��肽���D
�� ��
�d�q�q�@���������R���u���ɂ͑��d�w�̌v�Z���@�ɂ��Ă������������D�܂��y���C�J���C�Ꮏ�C�A�X�t�@���g�̔�U�d���̒l���R�`�S������p�����Ē������D�S���犴�ӂ������܂��D
�� ��
[1] ���䒼��,�����i��,��c�P�Y�C�g�O���C�h�p�X�ɑ���\�����E�n�`�̉e���ɂ����C�h�d�q�q�@�������Cno.38�Cpp.1�|14�C1982.8�D
[2] ���䒼��,��c�P�Y,�����i��C�gILS�O���C�h�p�X�ɑ���ϐ�̉e���ɂ��ā|ILS-GP�V�H�c��`�ϐ��Q�����ɂ��ā|�C�h�d�q�q�@�������Cno.42�Cpp.31�|43�C1983.7�D
[3] ���R���u,���q���O,�c���T�v�C�gILS�O���C�h�p�X���˖ʂ̐ϐ�ɂ��p�X�����̕ω��C�h�d�q�q�@�������������\��C��V��,pp.127�|130�C2007.6�D
[4] ���R���u,�����珺,�{���Ȍ�C�g�C���`�̒n�ʍ\���ɂ��ILS�O���C�h�p�X�ւ̉e���̌y�����@�C�h�M�w�Z��CSANE2002-35,pp.19-25,2002.07.
[5] ���R���u,���q���O,�c���T�v�C���c�a��,�g�X��`�̐ϐ�ɂ��LLZ�̃R�[�X�ΈʁC�h�d�q�q�@�������������\��C��8��,pp.95�|100�C2008.6�D
[6] ���R���u,���q���O,�c���T�v�C���c�a��,�g�Z��ϓ����ŏ�������f�o���j�^�����C�h�d�q�q�@�������������\��C��6��,pp.45�|48�C2006.6�D
[7] ���{�C�C�g�d�g�z���̓���C�h�X�k�o�ŁCpp.26�|41�C1997.10.
[8] �q��ۈ������V�X�e������,�g�����W�N�x�q���{�ݐ����n���h�u�b�N�i�Z�p�ҁj�^�A�ȍq��NJďC�C�h�o�ϒ�����Cpp356-357,pp.390�|390�C1996.11�D
�lj�����
�E�u Siting Criteria for Instrument Landing Systems �v ,FAA order 6750.16D,
FEBRUARY 14,2005�@�͉��L�ʼn{���ł��܂��D
�@�@�@�@�@http://airspaceusa.com/PDF/6750_16d.pdf
�E�u United States Standard Flight Inspection Manual �v, FAA, ORDER 8200.1A, MAY 1996�@�͉��L�ʼn{���ł��܂��D
�@�@�@�@�@http://avnwww.jccbi.gov/icasc/PDF/82001a.pdf
![]()